

4.2.2.2. Структура устройства автоматического управления, работающего по принципу компенсации внешнего возмущения на объект управления.
Структура устройства автоматического управления, работающего по принципу компенсации внешнего воздействия на объект управления, представлена на рис. 4. В таких устройствах информация о внешнем воздействии на объект управления поступает на элемент коррекции, который по заданному алгоритму формирует сигнал управления, воздействующий на источник внешней энергии с целью формирования необходимой величины и направления управляющего воздействия на объект. Так как информация о результате управления не поступает на вход системы управления, то такие системы всегда разомкнуты.
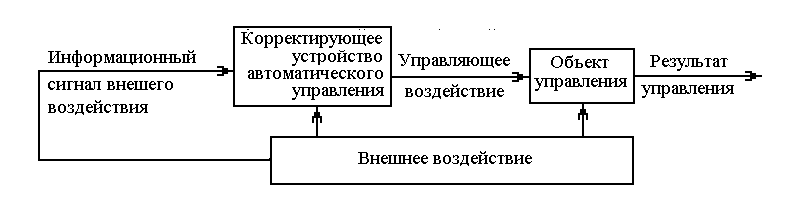
Рис.4. Структура устройства автоматического управления, работающего по принципу компенсации внешнего возмущения.
Пример: В системе автоматического поддержания температуры городской теплосети всегда замеряется температура окружающей среды. С понижением температуры наружного воздуха температура теплоносителя в этой сети пропорционально повышается для поддержания постоянной температуры в отапливаемых помещениях. И наоборот.
4.2..3. Автоматизированное управление.
Автоматизированное управление (рис.5) относится к комбинированному, человекомашинному способу управления, при котором управляющее воздействие на объект производится автоматическим управляющим устройством, работающему по заданному алгоритму без участия человека до тех пор, пока объект управления аботает в пределах заданного режима.
Если же под действием внешней среды режим работы объекта управления
Выходит за рамки заданных значений то в работу вступает субъект управления ( оператор) , который при этом выполняет одно из de[ возможных действий.
Он прежде всего корректирует величину задающих сигналов или алгоритм управления. Если эти действия субъекта не дают необходимого результата то он управляет объектов вручную. После выхода из аварийной ситуации дальнейшее управление объектом снова производится в автоматическом режиме.

Рис. 6. Структура системы автоматизированного управления объектом
Аварийная ситуация требует от оператора перехода действий, связанных с вводом новых уровней задающих сигналов или с корректировкой алгоритмов управления. Примером автоматизированной системы может быть система управления самолетом.
На этапе взлета управление самолетом производится пилотом в ручном режиме. Как только самолетом будут достигнуты заданная высота, направление и скорость полета, пилот переводит его управление в автоматизированный режим, который выполняется автопилотом. При этом пилот по приборам только наблюдает за параметрами полета. В случае аварийной ситуации пилот корректирует задающие сигналы системы автоматики или в критической ситуации переходит на ручной режим управления, т.е. отключает автопилот. При посадке самолета меняется алгоритм управления, поэтому в этом случае автопилот переводится в режим автоматической посадки самолета.
5. Элемепнты теории работы дискретных авоматов
Большинство систем автоматического управления в своем составе имеют элементы, которые работают в режиме «включено-выключено» по сигналам поступающим от соответствующих датчиков. Такие системы принято назвать дискретными автоматами. Описание свойств и состояния этих автоматов производится наукой называемой «Теория работы дискретных автоматов».