

6.2.3. Автоматизация работы дожимной насосной станции
Дожимная насосная станция (рис. 92) после первичной сепарации нефти обеспечивает ее переток к установкам дальнейшего технологического цикла и поддержание там необходимого давления.

Рис. 92. Технологическая схема работы дожимной насосной станции
Основу этой станции составляют центробежные насосы с самозаливкой, к которым нефть поступает из установки первичной сепарации или из резервных буллитов. Закачка нефти в насосы производится через фильтры, которые устанавливаются как на всасывающих, так и на выкидных магистралях этой системы. Станция укомплектована всегда рабочим и резервным насосами Резервируют также фильтры и на ее выкидной магистрали. Включение в работу каждого из насосов или одного из фильтров на выкидной магистрали производится с помощью приводных задвижек, управляемых системой автоматики.
Система автоматизации управления работой дожимной насосной станции не только обеспечивает поддержание заданного давления нефти на выкидной магистрали, но и производит своевременное переключение рабочей линии на резервную в случае выхода из строя рабочего насоса или закупорки одного из рабочих фильтров. Для контроля рабочих параметров в технологической цепочке дожимной насосной станции используют следующие технические средства:
DM1 – DM4 – дифференциальные манометры;
P1, P3 – датчики давления на входе насосов;
P2, P4 – датчики давления на выходе насосов;
Z1 – Z6 – приводы задвижек и датчики их положения;
F1 – F4 – фильтры на линии нефти.
Эта аппаратура подключается к соответствующим портам контроллера системы управления дожимной насосной станцией по схеме, представленной на рис. 93.
К модулю (порту) дискретного ввода этого контроллера подключены, как и в предыдущем случае, кнопки управления и датчики положения задвижек. Аналоговые датчики давления и дифференциальные манометры подключены на вход модуля (порта) аналогового ввода. Двигатели всех задвижек и приводы насосов подключены к модулю (порту) дискретного вывода.
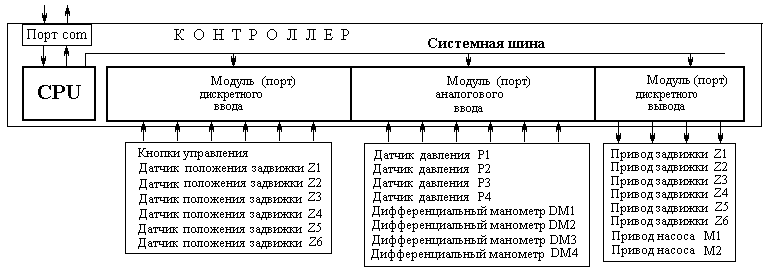
Рис. 93. Структура нижнего уровня системы управления дожимной насосной
станцией
Алгоритм управления дожимной насосной станцией имеет сложную структуру, состоящую из нескольких взаимосвязанных подпрограмм. Основная программа этого алгоритма представлена на рис. 94.
По этому алгоритму после ввода величины задающих сигналов выполняется цикл ожидания нажатия кнопки «Пуск», после нажатия которой происходит автоматический выбор насоса № 1 и задвижки Z5 в качестве рабочего оборудования технологического цикла. Этот выбор фиксируется присвоением единичного значения константам N и K. По значению этих констант в дальнейшем будет определен выбор направления ветвления в подпрограммах алгоритма.
Эти подпрограммы запускаются основным алгоритмом сразу же после подачи команды на открытие задвижки Z1, соединяющей технологическую линию дожимной насосной станции с установкой первичной сепарации нефти. Первая из этих подпрограмм «Пуск насосов» управляет процессом запуска рабочего (или резервного) насоса, а другая подпрограмма «Контроль параметров» производит текущий контроль основных параметров технологического процесса и в случае их несоответствия заданным значениям осуществляет переключения в технологической цепочке этого процесса.
Подпрограмма «Контроль параметров» запускается циклически на всем протяжении рабочего цикла этого процесса. Одновременно в этом цикле производится опрос кнопки «Стоп», при нажатии которой закрывается задвижка Z1. Затем, прежде чем остановить основную программу, алгоритм запускает на выполнение подпрограмму «Останов насоса». По этой подпрограмме выполняются последовательные действия по остановке рабочего насоса.
По подпрограмме «Пуск насоса» (рис. 95) первоначально производится анализ содержания параметра N, которым определен номер рабочего насоса (соответственно N=1 для насоса № 1 и N=0 для другого насоса). В зависимости от значения этого параметра алгоритм выбирает ветвь запуска соответствующего насоса. Эти ветви аналогичны по структуре, но отличаются только параметрами технологических элементов.

Рис 94. Алгоритм управления дожимной насосной станцией
Первой процедурой выбранной ветви этой подпрограммы производится опрос дифференциального датчика давления DM1, содержание которого определяет рабочее состояние соответствующего фильтра на входе насосного агрегата. Показания этого датчика сравниваются с заданным предельным значением относительного давления на фильтре. При зашламованности фильтра (когда он требует чистки) разность давлений на его входе и выходе будет превышать заданное значение, поэтому данная технологическая ветвь не может быть запущена в работу, и потребуется переход на запуск резервной линии, т.е. резервного насоса.
В случае нормального состояния фильтра его фактическое разностное давление меньше заданного, и алгоритм переходит к опросу датчика, контролирующего давление на входе выбранного насоса. Снова показания этого датчика сравниваются с заданным значением. В случае недостаточного давления на входе насоса он не сможет выйти на рабочий режим, поэтому он также не может быть запущен, а это снова потребует перехода на запуск резервного насоса.

Рис. 95. Структура подпрограммы «Пуск насоса»
В случае нормального значения давления на входе насоса следующая команда подпрограммы запускает его, при этом параметру N присваивается соответствующее числовое значение, а дискретные датчики контроля запуска насоса контролируют этот процесс. После этого запуска опрашивается датчик, контролирующий давление на выходе запущенного насоса. В случае, если это давление окажется ниже заданного уровня, насос тоже не может работать в нормальном режиме, поэтому и этот случай требует запуска резервного насоса, но только после остановки запущенного насоса.
Если же заданное давление на выходе насоса достигнуто, то это значит, что он вышел на заданный режим, поэтому на следующем шаге алгоритм открывает задвижку, соединяющую выход насоса с линией выходных фильтров системы. Открытие каждой из задвижек фиксируется дискретными датчиками ее положения.
На этом подпрограмма запуска насоса выполнила свои функции , поэтому на следующем шаге производится выход из нее в основную программу, где затем производится запуск следующей подпрограммы «Контроль параметров» работающей системы. Эта подпрограмма выполняется в цикле до тех пор, пока технологический процесс не будет остановлен кнопкой «Стоп».
Структурно подпрограмма «Контроль параметров» идентична подпрограмме «Пуск насоса», однако имеет некоторые особенности (рис. 96).

Рис. 96. Структура подпрограммы «Контроль параметров»
В этой подпрограмме, как и в предыдущей, производится последовательный опрос тех же датчиков и сравниваются их показания с заданными значениями контролируемых параметров. В случае их несоответствия подается команда на закрытие соответствующей задвижки и на остановку соответствующего насоса, при этом параметру N присваивается значение, противоположное предыдущему. После всего этого производится запуск подпрограммы «Пуск насоса», по которой включается в работу резервный насос.
Если все контролируемые параметры соответствуют заданным значениям, то, прежде чем выйти в основную программу, алгоритм проверяет состояние фильтров основной магистрали. Для этой цели запускается подпрограмма «Управление задвижками Z5 и Z6» (рис. 97), по которой в случае выхода из строя одного из этих фильтров включается в работу резервный фильтр.

Рис. 97. Структура подпрограммы «Управление задвижками Z5 и Z6 »
По этой подпрограмме через анализ значения параметра K в ней выбирается рабочая ветвь, по которой производится опрос дифференциального манометра работающего фильтра. В случае нормальной работы фильтра разность фактического давления между входом и выходом фильтра не будет превышать заданного значения, поэтому алгоритм по условию «да» выходит из подпрограммы без изменения структуры подключения элементов в магистрали.
В случае превышения этой разницей заданного значения алгоритм следует по условию «нет», в результате чего закрывается работающая задвижка и открывается резервная, а параметру N присваивается противоположное значение. После выполнения этого производится выход из этой подпрограммы в предыдущую, а из нее в основную программу.
Процесс контролируемого пуска рабочего насоса, а в случае его поломки запуска резервного производится алгоритмом автоматически. Аналогично осуществляется контролируемый запуск фильтров через включение задвижек в основной магистрали.
При нажатии на кнопку «Стоп» цикл непрерывного контроля за параметрами системы прекращается, закрывается задвижка, подключающая дожимную насосную станцию к сепарационной установке, и производится переход к подпрограмме «Останов насоса» (рис. 98).
По этой подпрограмме на основе анализа параметра N выбирается одна из двух идентичных ветвей следования алгоритма. По ней алгоритмом первоначально подается команда на закрытие задвижки, установленной на выходе работающего насоса. После закрытия ее другая команда останавливает работающий насос. Затем новым анализом значения уже параметра K выбирается ветвь алгоритма, по которой закрывается задвижка работающего магистрального фильтра, после чего алгоритм останавливает свою работу.

Рис. 98. Структура подпрограммы «Останов насоса»
