

6.2.2. Автоматизация технологического процесса первичной сепарации нефти
Технология первичной сепарации нефти (рис. 89) складывается из процесса ее подогрева до заданной температуры в печи 1 с последующим разделением ее на три фракции: нефть, газ и воду.
Подогрев исходной нефтегазовой смеси, которая поступает по трубопроводу 5 от автоматизированной групповой замерной установки (АГЗУ), производится в печи 1 за счет тепла горелок 3, в которых сжигается газообразное топливо в смеси с воздухом, поступающее по соответствующему трубопроводу.

Рис. 89. Структура технологического процесса первичной сепарации нефти
Нагретая смесь через циклон 7 поступает далее в герметичную полость сепарационной емкости 15, которая носит название буллита. В этой первичной полости буллита, на выходе циклона, исходная смесь разделяется на газовую и жидкую фракции.
Газовая фракция с помощью газового клапана 6, создающего внутреннее давление, вытесняется через него из буллита в трубопровод газовой линии 14. При этом газ проходит через соответствующий фильтр 8, который отделяет из него остаточный конденсат.
Жидкая фракция исходной смеси медленно стекает вниз по наклонным поверхностям 9. При этом от нее отделяется остаточная газовая фракция. Жидкая фракция скапливается в нижней части первичной герметичной полости буллита и внутренним давлением через отверстия выталкивается из нее в трубу 11, которая соединяет первичную герметичную полость со вторичной. Эти полости разделены перегородкой 10. Во второй герметичной полости жидкая фракция отстоем разделяется на нефть и воду.
Нефть после отстоя отводится по трубе 13 в нефтяную линию, а вода по трубе 12 в линию сброса воды.
Технологический процесс первичной сепарации нефти контролируется автоматически с помощью первичных датчиков и исполнительных устройств, к которым относятся:
Р1 – датчик давления топливного газа;
Р2 – датчик давления в герметичной полости буллита;
Т1 – датчик температуры смеси на входе буллита;
Т2 – датчик температуры в герметичной полости буллита;
L1 – датчик верхнего уровня нефтяной фракции;
L2 – датчик верхнего уровня водяной фракции;
Q – датчик расхода воздуха, подводимого к горелке;
Z1 – Z3 – датчики положения задвижек соответствующих линий.
Управление технологическим процессом первичной сепарации нефти производится в автоматизированном режиме (рис. 90).
На верхнем информационном уровне этой системы расположен компьютер оператора, связанный через информационную сеть с функциональными элементами нижележащих уровней.
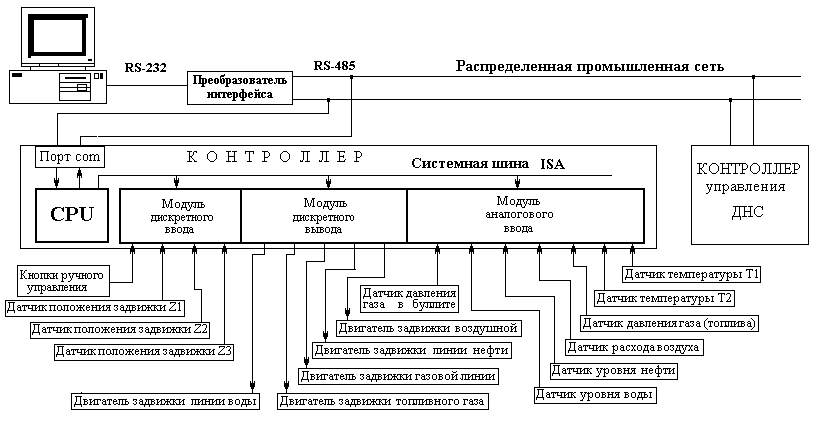
Рис. 90. Структура системы автоматизированного управления работой
установки первичной сепарации нефти
На уровне управления расположены управляющие контроллеры. Один из них управляет процессом первичной подготовки нефти, а другой процессом работы дожимной насосной станции (ДНС).
Первый из этих контроллеров является контроллером локального типа. Он через процессор CPU связан по системной шине ISA с модулями расширения, к которым подключены соответствующие датчики и исполнительные устройства.
К модулю дискретного ввода подключены все кнопки управления процессом и датчики положения задвижек. Аналоговые датчики температуры и давления, а также датчики уровня и расхода подключены на вход модуля аналогового ввода. Выходные сигналы этой системы формируются модулем дискретного вывода, к которому подключены двигатели всех задвижек.
Работа микропроцессорной системы управления технологическим процессом первичной сепарации нефти происходит по алгоритму, часть которого представлена на рис. 91.

Рис. 91. Часть структуры алгоритма контроля уровня жидкой фракции
После запуска этого алгоритма и ввода задающих сигналов производится опрос аналогового датчика уровня нефти во вторичной камере буллита. Затем этот фактический уровень нефти сравнивается с заданной величиной, и если он превысит это заданное значение, то подается сигнал на открытие задвижки в линии нефти. При этом в цикле типа «пока» производится опрос состояния задвижки до тех пор, пока она не откроется полностью. После открытия задвижки цикл опроса датчика ее положения прекращается и происходит возврат к опросу датчика уровня нефти в буллите.
Вследствие открытия задвижки этот уровень должен уменьшаться на заданное значение, поэтому при сравнении заданного и фактического уровней ветвление алгоритма произойдет в направлении «нет». После этого вновь опрашивается датчик положения задвижки, и если она открыта, то снова подается команда на ее закрытие.
На этом этап опроса датчика уровня нефти заканчивается, и алгоритм переходит к опросу датчика уровня воды в буллите. Величина этого уровня регулируется алгоритмом подобным образом.