

6.1.2. Микропроцессорная система управления процессом бурения нефтяных или газовых скважин
Использование микропроцессорных систем для управления процессом бурения позволило не только успешно решить проблему эффективного регулирования технологического процесса бурения скважин, но и обеспечить своевременную передачу и оперативную обработку информации о параметрах этого технологического процесса. Структура такой системы в упрощенном варианте показана на рис. 81.
Система автоматизированного управления бурением нефтяных и газовых скважин имеет многоуровневую структуру. На верхнем информационном уровне этой системы расположен компьютер оператора, связанный через информационную сеть с функциональными элементами нижележащих уровней. Основное назначение элементов этого уровня системы − сбор и обработка информации о результатах бурения, а также сбор и архивирование информации об аварийных ситуациях, возникающих в процессе бурения скважин, управление скоростью бурения и величиной допустимой нагрузки на долото. Компьютер этого уровня связан со структурными элементами нижних уровней системы через последовательный порт по физическому протоколу RS-485.
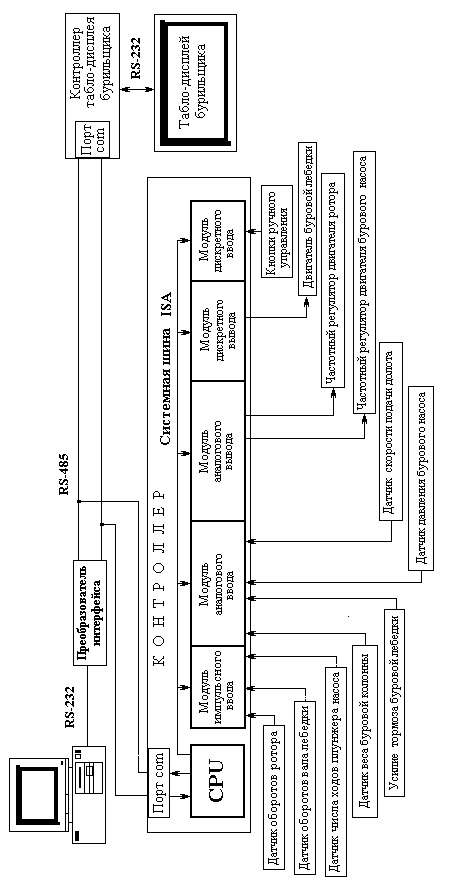
Рис. 81. Структура микропроцессорной системы автоматизированного
управления бурением нефтяных и газовых скважин
На уровне управления (нижний уровень) в этой системе расположен ПЛК локального типа, связанный по системной шине ISA с портами и модулями расширения. По этой шине процессор CPU контроллера передает портам и модулям расширения команды или получает от них цифровые сигналы для их дальнейшей обработки.
На самом нижнем (полевом) уровне расположены датчики и исполнительные устройства, подключенные к соответствующим портам самого контроллера или к портам модулей расширения.
На технологической схеме (см. рис. 77) буровой установки показан лишь минимальный набор датчиков и исполнительных устройств. К ним относятся датчики: 1 − оборотов ротора, 2 − оборотов вала лебедки, 3 − числа ходов плунжера насоса, 4 − веса колонны ГИВ-6, 5 − усилия тормоза лебедки, 6 − скорости подачи долота, 7 − давления бурового насоса. В состав исполнительных устройств входят: 8 − частотный регулятор привода ротора, 9 − частотный регулятор двигателя бурового насоса, 10 − двигатель буровой лебедки. Эти устройства подключены к соответствующим модулям управляющего контроллера.
Процесс управления бурением выполняется SCADA-программой, которая хранится в памяти ПЛК. С помощью программного пакета контроллером на основе сигналов датчиков регулируются: частота вращения ротора, количество подаваемого в скважину бурового раствора, необходимое давление бурового раствора.
На верхний уровень этот контроллер пересылает данные о фактическом состоянии элементов системы и об уровне параметров технологического процесса бурения. Переданные на верхний уровень данные обобщаются в головном компьютере и архивируются сервером этого уровня. Из этих данных особо выделяются сведения об аварийных ситуациях, которые также архивируются для последующего их анализа.