

4.2. Функциональные структуры систем управления.
Способ формирования управляющего воздействия на объект управления определяет вид управления, которое по этому признаку может быть:
Ручным;
Автоматическим;
Автоматизированным.
4.2.1.. Ручное управление
При ручном управлении управляющее воздействие на объект управления производится непосредственно человеком через его мускульное воздействие или через технические устройства, усиливающие это воздействие. Структура этого вида управления показана на рис. 2.
Если мускульного воздействия человека достаточно для управления объектом то человек-оператор (субъект управления) пропорционально формирует это воздействие своим мускульным усилием. И наоборот, если величина сопротивления управлению объектом превышает мускульные возможности субъекта, то в системах ручного управления используются различного типа усилители мускульного воздействия, с помощью которых он в форме управляющего воздействия воздействует на объект управления.
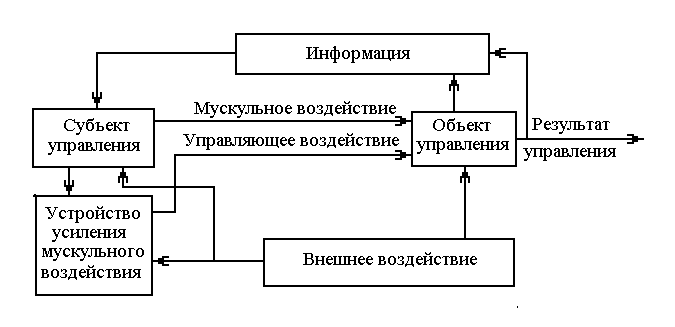
Рис.2. Структура системы ручного управления объектом.
Пример: Использование только мускульного усилия ног велосипедиста достаточно для торможения велосипеда и совершенно не достаточно для торможения подобным образом автомобиля. Поэтому для торможения автомобиля используют вакуумные усилители тормозного усилия, создаваемого ногой водителя,
4.2..2. Автоматическое управление.
При автоматическом управлении управляющее воздействие на объект управления производится автоматическим управляющим устройством, работающем по заданному алгоритму без всякого участия человека. В этом случае по каналу обратной связи устройство управления получает информацию о результате управления и состоянии объекта управления, на основе которой по заданному алгоритму формируется величина этого воздействия.
По способу формирования управляющего воздействия автоматические устройства управления бывают двух типов:
Работающие по принципу компенсации отклонения результата управления;
Работающие по принципу компенсации внешнего возмущения на объект управления.
4.2..2.1. Структура устройства автоматического управления, работающего по принципу компенсации отклонения результата управления.
Структура устройства автоматического управления, работающего по принципу компенсации отклонения результата управления, представлена на Рис.3. В таких устройствах задающий сигнал сравнивается с информацией (сигналом), полученной по каналу обратной связи о результате управления или о состоянии объекта управления. В случае рассогласования этой информации элемент сравнения вырабатывает сигнал коррекции, который по заданному алгоритму воздействует пропорционально этому отклонению на источник внешней энергии с целью формирования необходимой величины и направления управляющего воздействия на объект управления. Так как информация о результате управления в виде сигнала через канал обратной связи вновь поступает на вход системы управления, то такие системы всегда замкнуты.
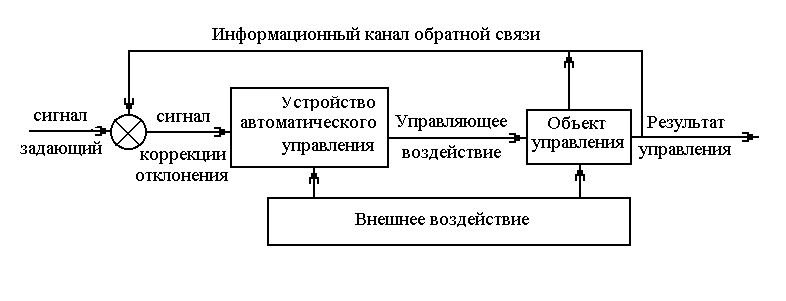
Рис.3. Структура системы автоматического управления, работающего по принципу компенсации отклонения результата управления.
Пример: В системе автоматического управления скоростью движения подъемного сосуда шахтной подъемной установки всегда замеряется фактическая скорость подъема. Если по какой то причине эта скорость будет больше заданной, то уменьшается возбуждение подъемного электродвигателя или производится торможение барабана подъемной машины.