

6.1. Автоматизация процесса бурения нефтяных или газовых скважин
Бурение скважин является трудоемким и капиталоемким, но необходимым процессом, без выполнения которого невозможна разведка и вскрытие нефтяных и газовых месторождений. Эффективность процесса бурения скважин во многом зависит от его автоматизации, успешное внедрение которой определяется использованием современных средств автоматики.
Основная трудность автоматизации бурения нефтяных или газовых скважин заключается в том, что информация о происходящих забойных процессах пока может быть получена только косвенным образом с помощью поверхностной аппаратуры, измеряющей реакцию узлов буровой установки на результат протекания этих процессов. Точность замера результата забойных процессов с помощью поверхностной аппаратуры не всегда достаточна для эффективного управления процессом бурения в автоматическом режиме.
Повысить точность этой аппаратуры можно путем использования сложных алгоритмов, учитывающих одновременно несколько косвенных параметров проявления забойного процесса. Однако это возможно при условии применения в управлении процессом бурения современных вычислительных устройств, в том числе и микропроцессорной техники.
Проходка нефтяных или газовых скважин может выполняться одним из двух возможных способов: роторным или турбинным.
Роторное бурение скважин (рис. 76) применяется на начальном этапе их сооружения, когда они бурятся по относительно слабым и геологически сложным породным горизонтам. При этом способе бурения вращение буровому долоту передается от механизма вращения буровой установки вращением буровой колонны.
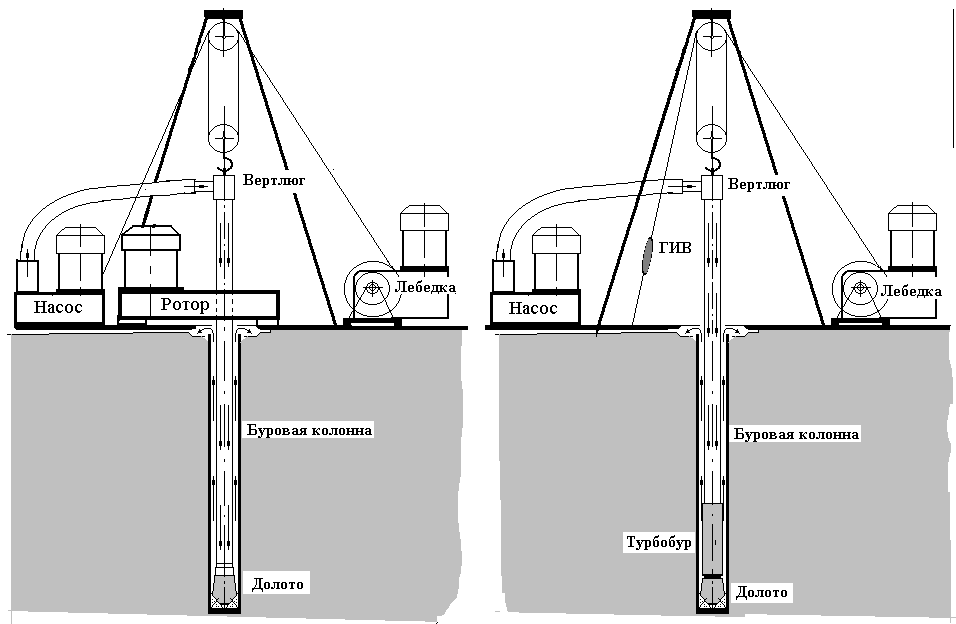
Рис. 76. Технологическая схема роторного бурения скважин
Осевое усилие на долото создается частью веса буровой колонны, которая подвешивается с помощью вертлюга и канатной полиспастной системы на буровой вышке. Величина этого усилия регулируется тормозным моментом на барабане буровой лебедки. На этот барабан наматывается канат полиспастной системы подвески буровой колонны. Для удаления продуктов бурения из забойной части скважины во внутреннюю полость буровой колонны подается буровой раствор, плотность которого достаточна для выноса на земную поверхность продуктов разрушения забоя. Этот раствор подается под давлением, которое создается буровым насосом. После выноса на устье скважины продуктов бурения буровой раствор очищается от них, дополнительно обрабатывается и вновь закачивается в скважину. Для того чтобы при бурении стенки скважины не подвергались разрушению, они закрепляются специальными трубами, которые называют обсадными. Эти трубы на всей длине скважины соединяются в обсадную колонну.
Турбинное бурение скважин (рис. 77) применяется при больших глубинах бурения.
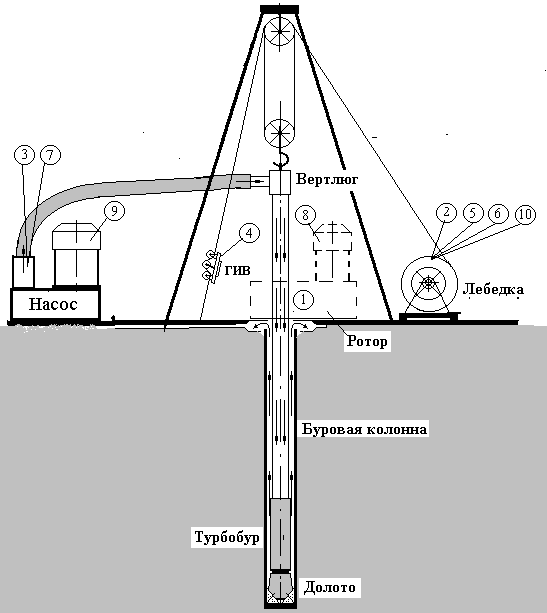
Рис. 77. Технологическая схема турбинного бурения скважин
Особенностью технологии турбинного бурения является то, что буровая колонна в этом случае остается неподвижной, а вращение бурового долота обеспечивается специальным устройством, которое называется турбобуром. Турбобур находится в нижней части буровой колонны и с помощью встроенной в его конструкцию системы турбин преобразует давление бурового раствора в момент вращения долота, жестко связанного с этой системой. После выхода из турбобура буровой раствор омывает забой скважины и, как в предыдущем способе бурения, выносит продукты бурения на устье скважины. В остальном эта технология мало отличается от предыдущей.
Разновидностью турбобуров являются электробуры, которые оборудуются асинхронными электродвигателями специальной конструкции, электроэнергия к которым подается по специальному кабелю, расположенному во внутренней полости труб буровой колонны. Момент от этого двигателя через редуктор передается буровому долоту. Сложность этой конструкции состоит в том, что буровой раствор на забой скважины должен проходить через электродвигатель и редуктор.