

10.5. Структура алгоритма автоматического управления конвейерной линией в цифровом варианте
Автоматизация подземного рельсового танспорта
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации должны выполнять следующие задачи.
Обеспечивать автоматический пуск и разгон рудничного поезда без пробуксовки ведущих колес локомотива (электровоза).
Обеспечивать автоматическое регулирование скорости движения рудничного поезда в соответствии с профилем рельсового пути.
Обеспечивать автоматическое торможение рудничного поезда при подаче команды «стоп» при минимальной величине тормозного пути.
Обеспечивать безопасное движение рудничного поезда на опасных участках подземных рельсовых трассах.
О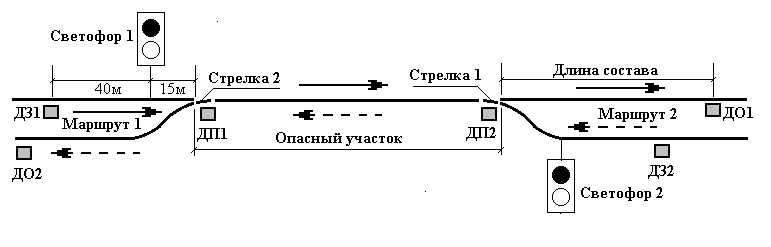 пасными
участками подземных рельсовых трасс
считаются такие их участки, на которых
происходит встречное движение составов
по одной колее. Опасные участки оборудуются
светофорами и аппаратурой автоматической
блокировки и сигнализации. Схема
расположения датчиков и аппаратуры
световой сигнализации на опасном участке
подземной рельсовой трассы показана
на рис. 62.
пасными
участками подземных рельсовых трасс
считаются такие их участки, на которых
происходит встречное движение составов
по одной колее. Опасные участки оборудуются
светофорами и аппаратурой автоматической
блокировки и сигнализации. Схема
расположения датчиков и аппаратуры
световой сигнализации на опасном участке
подземной рельсовой трассы показана
на рис. 62.
Рис.62. Схема расположения датчиков и аппаратуры автоматической блокировки и сигнализации..
В эту схему введены следующие обозначения:
ДП – датчик положения;
ДЗ – датчик запроса;
ДО – датчик отбоя.
Опасный участок подземной рельсовой трассы, по которому наблюдается встречное движение шахтных поездов по одноколейному пути, оборудуется с обеих сторон стрелочными переводами, на каждом из которых устанавливается датчик положения ДП. Этот датчик фиксирует вход на стрелку опасного участка передней пары ходовых колес электровоза. За 15 метров от этих датчиков устанавливаются входные светофоры, которые одновременно загораются красным светом при срабатывании датчика положения ДП. Датчик запроса маршрута ДЗ устанавливается за 40 метров от входного светофора. При срабатывании этого датчика на свободном опасном участке подземной трассы переводятся все стрелки на выбранном маршруте. Датчик отбоя ДО устанавливается за выходной стрелкой выбранного маршрута на расстоянии длины рудничного поезда. Этот датчик срабатывает тогда, когда последняя вагонетка состава выйдет за пределы опасного участка. В этот момент ходовые колеса электровоза войдут в зону чувствительности этого датчика, и он сработает.
Все перечисленные датчики входят в состав аппаратуры автоматизации и световой сигнализации стрелочных переводов. Эта аппаратура должна удовлетворять определенным требованиям.
11.1. Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта
Системы автоматической блокировки и световой сигнализации рельсового транспорта должны обеспечивать:
Автоматическое переключение зеленого сигнала светофора на красный при срабатывании датчика положения.
Автоматический перевод всех стрелок на выбранном маршруте при срабатывании датчика запроса, если выбранный маршрут свободен.
Автоматическое переключение нормально горящего красного сигнала светофора на мигающий красный при срабатывании датчика запроса.
Автоматическое включение мигающего зеленого сигнала светофора, если не все стрелки переведены на выбранном маршруте.
Автоматическое переключение красного сигнала светофора на зеленый при срабатывании датчика отбоя.
Все перечисленные требования реализуются в аппаратуре типа «АБСС-1» или «Нерпа».