

Требования к системам автоматизации буровых машин
Системы автоматического управления работой буровых машин должны обеспечивать:
Автоматическую установку буровой машины в нужной точке забоя в соответствии с паспортом ведения буровзрывных работ.
Автоматическое забуривание шпуров на соответствующих режимах бурения.
Автоматический переход от режима забуривания на режим нормального бурения на заданную глубину.
Автоматическое отключение подачи и ее реверсирование при достижении заданной глубины бурения без отключения буровой машины.
Автоматическое отключение всех приводов при установке буровой машины в исходное положение.
Автоматическое задание нового очередного положения шпура.
В случае необходимости обеспечение возможности перехода на ручное управление.
Автоматизация установки буровой машины в нужную точку забоя
Автоматическая установка буровой машины в нужную точку забоя в соответствии с паспортом буровзрывных работ производится роботом манипулятором, который может быть установлен на самоходное шасси буровой машины или на шасси погрузочной машины. Схема такой установки показана на рис. 51. На этой схеме к корпусу погрузочной машины 1 крепится робот- манипулятор 3, на котором устанавливается буровая машина 2.
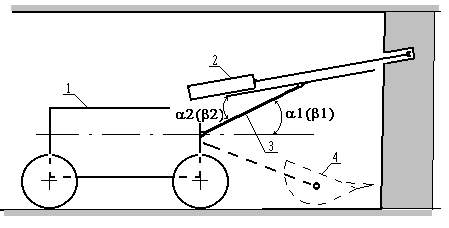
Рис. 51. Схема робота-манипулятора буровой машины, установленного на
шасси погрузочной машины с помощью.
Робот манипулятор определяет положение буровой машины относительно груди забоя. Для каждого положения буровой машины относительно груди забоя паспортом ведения буро-взрывных работ определяются значения четырех параметров α1, β1, α2, β2. Величина этих параметров определяет положение шпуров на плоскости (груди) забоя.
Параметры α1, β1 определяют угловое положение (в вертикальной α1 и горизонтальной β1 плоскости) корпуса манипулятора 3 относительно продольной оси буровой каретки (погрузочной машины 1). Параметры α2, β2 определяют в том же соответствии угловое положение продольной оси буровой машины 2 относительно продольной оси манипулятора 3.
Система автоматического управления процессом установки буровой машины в нужной точке забоя реализуется в микропроцессорном варианте. Структура такой системы показана на рис.54. Для управления роботом-манипулятором предусмотрены два модуля один из них модуль аналогового ввода, а другой дискретного вывода. К модулю аналогового ввода подключены датчики углового положения Дα1, Дβ1 и Дα2, Дβ2, а к модулю дискретного вывода подключены электрогидроклапаы ЭГК1, ЭГК2, ЭГК3, ЭГК4, ЭГК5, ЭГК6, ЭГК7, ЭГК8, управляющие гидроцилиндрами манипулятора. Работа модулей управления манипулятором по установке буровой машины в нужную точку забоя определяется подпрограммой, входящей в состав общей программы управления работой буровой машины. Структура алгоритма этой подпрограммы приведена на рис. 52.
Рис.52. Структура алгоритма подпрограммы управления роботом-манипулятором.
Первой командой этого алгоритма производится включение электрогтдроклапана ЭКГ1, который перемещает манипулятор, при этом меняется его угловое положение по параметру α1. Следующей командой производится циклический опрос датчика Дα1, регистрирующего параметр α1. После чего определяется рассогласование Δα1 между фактическим и заданным значением этого параметра. В случае если параметр Δα1 = 0 то происходит выключение всех работающих приводов и делается переход к той части алгоритма, в которой производится отработка следующего углового параметра α2. Если указанное отклонение не равно нулю, то в зависимости его от величины и знака включается соответствующий привод, перемещающий манипулятор в сторону уменьшения до нуля контролируемой величины этого отклонения. При нулевом значении этого отклонения подпрограмма переходит к аналогичному регулированию следующих угловых параметров (β1, α2, β2). После отработки всех заданных параметров происходит выход из этой подпрограммы и возврат в исходную программу управления работой буровой машины.