

7.5.2. Система поддержания нагрузки на приводе выемочной машины помощью аппаратуры ипир-3м
Аппаратура ИПИР-3М это импульсный пропорционально-интегральный регулятор нагрузки на приводе выемочной машины. Она выпускается серийно в аналоговом варианте. Структура этого устройства представлена на рис.37.
Регулятор ИПИР-3М импульсного типа. Как и аппаратура САДУ-2 он содержит два контура управления. Один из них является контуром управления по мощности двигателя, другой по скорости подачи машины на забой. Как и в предыдущем случае, первый контур имеет наибольший приоритет.
Задающий и фактический сигналы по нагрузке двигателя подаются на элемент сравнения ктического и заданного тока нагрузки двигателя сигнал с элемента сравнения С1, который формирует два выходных сигнала импульсного типа. Первый импульсный сигнал появляется в том случае, если ток нагрузки двигателя будет превышать заданное значение. Этот сигнал подается на первый широтно-импульсный преобразователь ШИМ1, который преобразует сигнал положительного рассогласования в широтно-модулированный импульсный сигнал. Ширина импульса этого преобразователя пропорциональна величине положительного рассогласования между заданным и фактическим током нагрузки. Сигнал с ШИМ1 через логические элементы И-НЕ и релейный элемент (ключ К1), импульсно подается на логический ключ И второго контура управления. При отрицательном рассогласовании фактического и заданного тока нагрузки двигателя сигнал с элемента сравнения С1 подается на ШИМ2 , работающего по такому же принципу как и ШИМ1. Выходной сигнал этого модулятора импульсно включает релейный ключ А4, который через блок логики управляет исполнительными электромагнитами.
Контур регулирования
скорости подачи содержит элемент
сравнения С2,
предназначенный для сравнения заданной
и фактической скорости подачи комбайна.
Причем сигнал от задающего устройства
поступает через логический ключ И,
на который одновременно подается с
ключа К1
импульсный сигнал положительного
рассогласования токовой нагрузки
двигателя. Вторым входным сигналом
элемента сравнения С2
является сигнал с датчика скорости ДС.
Сигнал этого датчика включает одновременно
релейный ключ К4,
который регистрирует н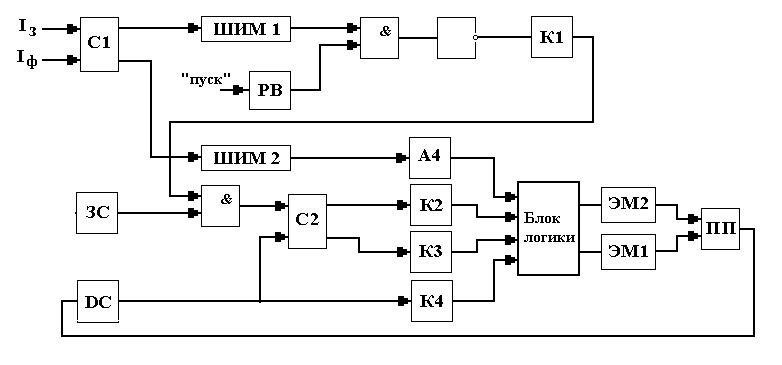 аправление
перемещения выемочной машины.
аправление
перемещения выемочной машины.
Рис.37. Структурная схема аппаратуры ИПИР-3М
Сигнал положительного рассогласования с элемента С2 подается на включение релейного ключа К2, а ключ К3 включается сигналом отрицательного рассогласования входного сигнала с элемента С2. Сигналы с ключей А4, К2, К3 и К4 одновременно подаются на блок логики, который по встроенному алгоритму включает исполнительные электромагниты ЭМ1 и ЭМ2. Эти электромагниты меняют величину скорости механизма подачи ПП выемочной машины. Скорость этой подачи регистрируется датчиком скорости ДС, а величина токовой нагрузки двигателя регистрируется трансформатором тока. Логика работы регулятора ИПИР-3М приведена в табл. 1.
Таблица 1.
Загрузка двигателя |
Норма |
Недогрузка |
Перегрузка |
|||
|
|
|
|
|||
Соотношение скоростей |
Vз =Vф |
Vз <Vф |
Vз >Vф |
Vз <Vф |
Vз >Vф |
|
|
К4 |
1 |
1 |
1 |
1 |
1 |
|
К2 |
0 |
1 |
0 |
Импульсы |
0 |
|
К3 |
0 |
0 |
1 |
0 |
Импульсы |
|
А4 |
0 |
Импульсы |
Импульсы |
0 |
0 |
Уменьшение |
ЭМ1 |
0 |
1 |
0 |
Импульсы |
0 |
Увеличение |
ЭМ2 |
0 |
0 |
Импульсы |
0 |
0 |
Согласно логике этой таблицы приоритетным параметром управления является загрузка двигателя, которая может быть: нормальной, недогруженной и перегруженной. Внутри каждого из этих вариантов загрузки двигателя различают еще вариант соотношения вторичного параметра регулирования - скорости подачи комбайна, которая в свою очередь может превышать ее заданное или быть меньше этого значения.
При нормальных соотношениях обеих параметров блок логики отключает оба электромагнита, так как нет необходимости в их регулировании. При недогрузке двигателя и перегрузке по скорости регулятор постоянно снижает скорость подачи до тех пор, пока не сравняются ее фактическое и заданное значение. Если же скорость подачи при недогрузке двигателя ниже заданного значения, то регулятор импульсно (ступенчато) увеличивает эту скорость. При этом на каждом импульсе увеличения скорости подачи проверяется степень токовой перегрузки двигателя. Это позволяет снизить возможность перегрузки двигателя при определенных значениях возрастающей скорости подачи. Как только появляется эта перегрузка, регулятор прекращает увеличение скорости подачи комбайна.
При перегрузке двигателя и превышении скорости подачи регулятор также импульсно снижает эту скорость до заданного значения нагрузки и скорости. Если же при перегрузке двигателя скорость подачи ниже заданной, то регулятор не производит изменения скоростей. При этом со временем процесс нормализуется естественным способом.
Принцип управления, заложенный в аппаратуре ИПИР-3М, может быть реализован в микропроцессорном варианте. Схема микропроцессорного варианта аппаратуры ИПИР-3М представлена на рис.38.
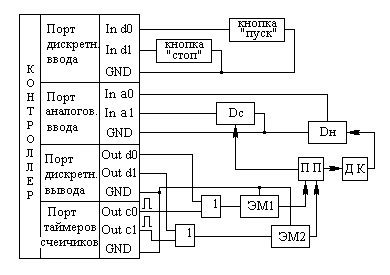
Рис. 38. Схема микропроцессорного варианта аппаратуры ИПИР-3М.
Как и в предыдущем случае, основу такой аппаратуры составляет микропроцессорный контроллер или микропроцессорные модули с портом аналогового ввода и с портами дискретного ввода-вывода. К порту дискретного ввода подключены кнопки «пуск» и «стоп», а к порту аналогового ввода подключены датчики нагрузки «ДН» и скорости «ДС». К порту дискретного вывода подключены исполнительные Электромагниты «ЭМ1» и «ЭМ2». Кроме того в этом микроконтроллере (или модуле) использован порт встроенных таймеров-счетчиков, которые программно выдают импульсные сигналы, подаваемые через логические ключи «ИЛИ» совместно с дискретными сигналами для управления электромагнитами.
Алгоритм управления этой системы в упрощенном варианте представлен на Рис.39.

Рис.39. Алгоритм работы аппаратуры ИПИР-3М
После запуска этого алгоритма производится ввод заданных предельных значений тока нагрузки двигателя и скорости подачи комбайна. Затем происходит переход к циклическому процессу работы микропроцессорного регулятора. Последовательно производится опрос датчиков тока и скорости подачи комбайна.
Так как контур регулирования нагрузкой двигателя является приоритетным, то в начале этого цикла фактическая нагрузка двигателя сравнивается с заданной ее величиной, которая считывается из памяти микроконтроллера. Если фактическая нагрузка не будет превышать заданной, то происходит переход к оператору проверки равенства фактической и заданной скоростей подачи комбайна. В случае выполнения этого условия происходит возврат на начало этого цикла (к опросу датчиков), в противном случае производится проверка условия неравенства этих скоростей. При этом, если фактическая скорость подачи комбайна не будет превышать заданную, то включается режим импульсного увеличения этой скорости, до тех пор пока заданная скорость не сравняется с фактической.
В случае превышения фактической скорости подачи комбайна над заданной включается режим постоянного уменьшения этой скорости до заданной величины. Импульсный режим уменьшения не нужен, так как этом случае нет опасности перегрузки двигателя. Только в случае перегрузки двигателя и превышении фактической скорости подачи над заданной это снижение происходит в импульсном режиме.