

7.3.4. Двойной экстремальный вариант
Э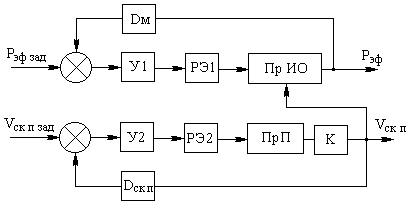 тот
вариант обеспечивает одновременное
управление по двум параметрам, один из
которых, как правило, является приоритетным.
Примером реализации такого варианта
является схема управления, представленная
на рис.30.
тот
вариант обеспечивает одновременное
управление по двум параметрам, один из
которых, как правило, является приоритетным.
Примером реализации такого варианта
является схема управления, представленная
на рис.30.
Рис.30. Структура системы автоматизации поддержания нагрузки на приводе
выемочной машины в двойном экстремальном варианте.
В этой схеме представлены два контура управления: один из них управляет эффективной мощностью двигателя, а второй скоростью подачи выемочной машины. При этом первый контур является приоритетным по сравнению со вторым контуром. Этот вариант применяется в основных системах автоматического поддержания нагрузки горных машин, таких как САДУ-2 и ИПИР-3М.
7.4. Автоматизация поддержания нагрузки в варианте стабилизации мощности на приводе врубовой машины «Урал–33» с электро-гидравлическими подающим механизмом.
Врубовая машина «Урал –33» в свое время применялась для создания врубовой щели в нижней части угольных пластов, которая облегчала последующее разрушение этого пласта буро-взрывным способом. Эта машина имела общий электропривод для режущего органа и гидравлической подающей части. Принципиальная схема автоматического управления этой машиной представлена на рис.31.
Датчиком нагрузки на приводе этой машины является трансформатор тока ТТ, включенный в одну из фаз силовой сети питания ее электродвигателя. Между двумя другими фазами этой сети включен трансформатор напряжения ТН, формирующий опорный сигнал и играющий роль задающего элемента системы, относительно которого настраивается вся система автоматики. Оба сигнала подаются на соответствующие выпрямительные мосты В1 и В2.
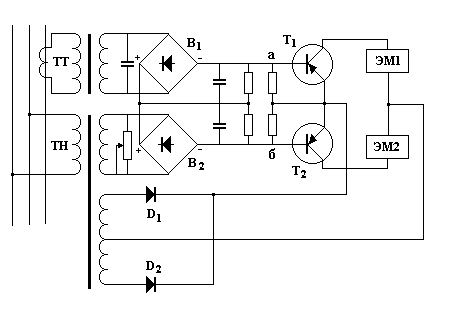
Рис.31. Принципиальная схема автоматического поддержания нагрузки на
приводе врубовой машины «Урал-33»
Выпрямительные мосты В1 и В2 входят в состав элемента сравнения системы, которая настраивается таким образом, чтобы при равенстве сигналов ТН и ТТ транзисторные ключи Т1 и Т2 находились бы в закрытом состоянии. При этом исполнительные электромагниты ЭМ1 и ЭМ2 должны находятся в обесточенном состоянии.
В случае перегрузки двигателя выемочной машины сигнал с трансформатора тока ТТ будет превышать задающий сигнал, в результате чего откроется транзистор Т1 и включит через свою эммитерно - коллекторную цепь электромагнит ЭМ1, воздействие которого на регулятор скорости подачи приведет к снижению этой скорости, а следовательно и к снижению нагрузки на двигателе.
В случае недогрузки двигателя выемочной машины на элементе сравнения будет преобладать задающий сигнал, что аналогично приведет к включения электромагнита ЭМ2, а следовательно к соответствующему увеличению скорости подачи и нагрузки на двигатель машины.
Принципиальная схема автоматического поддержания нагрузки на приводе врубовой машины, представленная на Рис.31. Эта схема реализует аналоговый вариант регулятора нагрузки.
Более современный, микропроцессорный (цифровой), вариант такого регулятора показан на рис.32. Основу такого регулятора составляет микропроцессорный контроллер с портами параллельного ввода-вывода или микропроцессорные модули с аналогичными портами.
Датчик нагрузки (трансформатор тока) подключен на один из каналов порта аналогового ввода. Трансформатор напряжения исключен из этой схемы, так как в нем нет необходимости в силу того, что цифровой задающий сигнал вводится в оперативную память контроллера, а элементом сравнения в нем является арифметическо-логическое устройство АЛУ. Кнопки «ПУСК» и «СТОП» подключены к соответствующим каналам порта дискретного ввода.
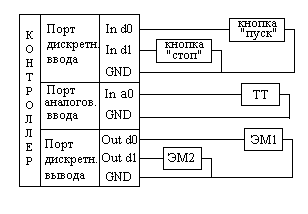
Рис.32. Принципиальная схема автоматического цифрового регулятора нагрузки
на приводе врубовой машины.
Исполнительные электромагниты ЭМ1 и ЭМ2 , воздействующие на регуляторы скорости подачи машины, подключаются к соответствующим каналам порта дискретного вывода. Взаимодействие всех элементов этой системы в процессе регулирования нагрузки на приводе машины определяется алгоритмом и написанной на его основе рабочей программой, которая хранится в памяти микроконтроллера. Структура этого алгоритма показана на рис.33.
После запуска этого алгоритма в цикле опрашивается состояние кнопки «Пуск», при нажатии которой происходит переход к циклическому процессу работы регулятора. В начале этого цикла опрашивается датчик нагрузки (трансформатор тока), после чего фактическая нагрузка двигателя сравнивается с заданной. При равенстве этих нагрузок происходит циклический возврат к опросу датчика тока. При неравенстве этих сигналов в зависимости от их соотношения происходит включение электромагнитов ЭМ1 или ЭМ2. Возврат к очередному циклу работы регулятора происходит после анализа состояния кнопки «Стоп». Если эта кнопка нажата, то цикл работы прекращается и происходит останов всего алгоритма.

Рис.33. Алгоритм поддержания нагрузки на приводе врубовой машины