

Микрпроцссорные системы управления технологическими процессами
Современные микропроцессорные системы автоматического управления технологическими процессами выполняются на основе микроконтроллеров, которые могут быть встроенными непосредственно в технологическое оборудование или объединяться в распределительные промышленные сети для управления конкретным технологическим процессом
В отличие от аналоговых систем автоматики, структура которых определяется структурой алгоритма управления, микропроцессорные (цифровые) системы автоматики имеют постоянную структуру, а их функциональное назначение определяется только программой (алгоритмом) управления.
6.1. Структура микропроцессорных систем
Несмотря на разное конструктивное исполнение, все микропроцессорные системы автоматического управления имеют общую внутреннюю структуру (рис. 14).
Основой любой микропроцессорной системы управления является микропроцессор, или вычислитель, предназначенный для обработки дискретных цифровых сигналов и команд управления. Как основной структурный блок этой системы, микропроцессор связан со всеми остальными структурными блоками через систему трех шин. Шиной в микропроцессорной системе называют пучок проводов для передачи сигналов определенного назначения. Таких шин в микропроцессорной системе как минимум три. Среди них шина адреса (ША), шина данных (ШД) и шина управления (ШУ).
Шина адреса служит для передачи адреса обращения микропроцессора к другим периферийным структурным блокам. По шине данных в параллельном коде осуществляется двусторонний обмен цифровыми сигналами между микропроцессором и другими структурными блоками. Шина управления служит для передачи команд от микропроцессора к структурным блокам и обратно. Совокупность указанных шин носит название системной шины микропроцессорной системы и служит для связи микропроцессора с периферийными модулями различного назначения. Системная шина выполняется по международному стандарту и называется шиной ISA.
Постоянное запоминающее устройство (ПЗУ) служит для хранения отлаженного алгоритма управления объектом или для хранения мало меняющейся цифровой информации, используемой в управлении объектом. Микропроцессор может только считывать информацию из ПЗУ.
Оперативное запоминающее устройство (ОЗУ) служит для хранения любой информации, используемой в управлении объектом, в том числе и для хранения программ управления объектом. ОЗУ имеет двустороннюю связь с микропроцессором. ПЗУ и ОЗУ непосредственно связаны по системной шине ISA с микропроцессором, в то время как остальные структурные блоки связываются с ним через дешифратор внешних устройств (ДВУ), который позволяет им поочередно подключаться к микропроцессору. К внешним устройствам относятся программируемый параллельный интерфейс (ППИ) (адаптер параллельной связи), программируемый таймер (ПТ) и последовательный интерфейс (ПосПИ) (адаптер последовательной связи).
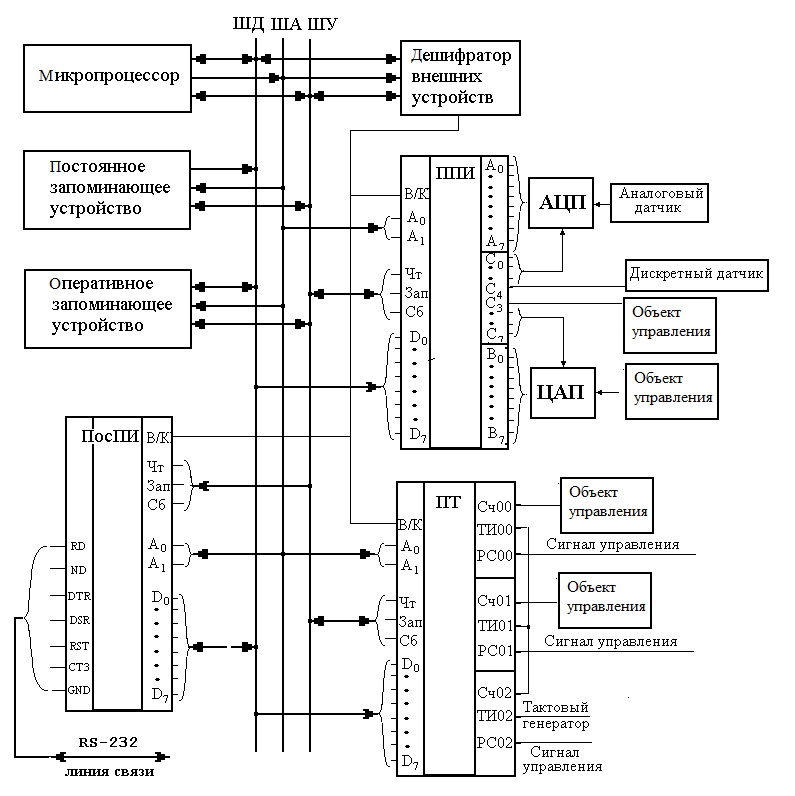
Рис. 14. Структура микропроцессорной системы управления
Программируемый параллельный интерфейс служит для связи микропроцессора с дискретными или аналоговыми объектами управления, в качестве которых могут быть датчики или исполнительные устройства объектов управления.
Программируемый таймер служит для управления объектами с помощью микропроцессора в функции времени.
Программируемый последовательный интерфейс служит для передачи в последовательном коде цифровых сигналов к объектам управления или к другим микропроцессорным системам, расположенным на значительном расстоянии от микропроцессора. Двусторонняя (дуплексная) передача сигнала по линии последовательной связи осуществляется по некоторым правилам, которые называют протоколом передачи данных.