

1. еоритические основы электротехники.
1.Электрическая цепь переменного тока, её элементы . -
Электрическая цепь - это совокупность устройств и объектов, образующих путь электрического тока. Отдельное устройство , входящее в состав электрической цепи и выполняющее в ней определенную функцию называется элементом электрической цепи(1. Элементы электрических цепей
Электромагнитные процессы протекающие в электротехнических устройствах как правило достаточно сложны, однако во многих случаях их основные хакактеристики можно описать с помощью таких интегральных понятий, как напряжение, ток, электродвижущая сила и т.д. При таком подходе совокупность электротехнических устройств состоящих из соответствующих образом соединенных источников и приемников электрической энергии рассматривают как электрическую цепь. Эл.цепь состоит из отдельных частей выполняющих определенные функции иназыва+емых элементами цепи. Основными элементами цепи являются источники и приемники электрической энергии. Электрические устройства, производящие энергию называются генераторами, а устройства потребляющие – приемниками. У каждого элемента цепи можно выявить некоторое число зажимов, полюсов, с помощью которых он соединяется с другими элементами, поэтому различаются 2х, 4х и многополюсные элементы. Двухполюсники имеют 2 зажима и к ним относятся источники энергии, резисторы, катушки индуктивности и конденсаторы.
2. Резистивный элемент
Рези́стор — пассивный элемент электрической цепи, в идеале характеризуемый только сопротивлением электрическому току, то есть для идеального резистора в любой момент времени должен выполняться закон Ома: мгновенное значение напряжения на резисторе пропорционально току проходящему через него.
В общем случае определение сопротивления связано с расчетом поля в проводящей среде, разделяющей два электрода.
Основной характеристикой резистивного элемента является зависимость U(I) или I(U), называемая вольт-амперной характеристикой.
Если зависимость U(I) представляет собой прямую линию, проходящую через начало координат то резистор называется линейным.
3. Индуктивный элемент
На ряду с резистором в эл. Цепи может включатся такой элемент, как катушка индуктивности или индуктивный элемент. Катушка – это пассивный элемент характеризующийся индуктивностью.
Для расчета индуктивности рассчитывают магнитное поле L=(трезубец)/i, где (трезубец) – потокосцепление, которое равно сумме произведений потока магнитной индукции пронизывающего витки, на число этих витков. (трезубец)=(эпсилон)*Ф(к-атое)*W(к-атое), где Ф – поток магнитной индукции.
Индуктивность измеряется в Генри и основной характеристикой индуктивности является ее вебер-амперной характеристикой.
Для линейных катушек индуктивности эта зависимость представляет собой прямую линию, проходящую через начало координат. L – const для линейного индуктивного элемента.
4. Емкостной элемент
Конденсатор – это пассивный элемент характеризующийся емкостью. Для расчета емкости необходимо рассчитать электрическое поле в конденсаторе. При этом емкость определяется отношением заряда на обкладках конденсатора на напряжение между ними: C=q/U
Емкость конденсатора зависит от геометрии обкладок и свойств диэлектрика находящегося между ними.
Основной характеристикой емкостного элемента является Кулон-Вольтная характеристика, которая если на графике изображается прямой линией, то показывает что емкостной элемент является линейным. C – const, q=CU
5. Топологические понятия теории электрических цепей
Ветвью называется участок электрической цепи с одним и тем же током.
Узлом называют участок эл.цепи, где соединяются 3 и более ветви.
2 геометрических узла образуют один потенциальный узел, если между ними не включен не один элемент.
Контуром называется замкнутый путь тока.
Независимым контуром называется контур, в который входит хотя бы одна новая ветвь. )
Электрические цепи можно классифицировать : по виду тока - цепи постоянного и переменного тока ; по составу элементов - цепи активные и пассивные , цепи линейные и нелинейные ; по харрактеру распределения параметров - цепи с сосредоточенными и распределенными параметрами.
Электрические цепи переменного тока , кроме того , различают по числу фаз - однофазные и трёхфазные .
2. Электрическая ёмкость.Единица измерения. -
Можно определить в каждой точке пространства где есть электрическое поле.хар-ки заряженного тела в этой системе явл его электрический заряд Q и потенциал V, причём величины характеризуют тело не в отдельных точках , а в целов и связаны между собой . C=Q/V . (Q=CV)
3. тепловое действие электрического тока .Закон Джоуля-Ленца.
4. Соединение источников тока и потребителей "Звездой" и "Треугольником". -
Соединение звездой - В симметричной цепи комплексы сопротивлений фаз
приемника одинаковы (Za=Zb=Zc=Z) и между зажимами приемника действует симметричная система линейных напряжений при любой схеме соединения источника ( Звездой ли треугольником) . Поэтому на расчётной схеме источник (генератор или трансформатор ) не показывают и говорят , что приемник включен в трёхфаную сеть.
В симетричной цепи жлсьаьлчгл полвесьи оасчёт одной фазы , так как токи и мощности во всех фазах одинаковы. При ихвестном линейном напрящении Uл фазное напряжение Uф=Uл/(корень)3. Фазный ток ,равный линейному Iф=Iл=Uф/Z.
Соединение треугольником - При соединение треугольником фазное напряжение Uф=Uл.
Ток в фазе Iф=Uф/Z ; Iл=(корень)3 Iф
5. Закон Ома для участка и всей цепи. - U/I=R => I=U/R
Электрическое сопротивление-Это противодействие , которое атомы и молекулы проводника оказывают направленному движению зарядов в проводнике.
6. Компенсация реактивной мощности.-
Компенсация реактивной мощности — целенаправленное воздействие на баланс реактивной мощности в узле электроэнергетической системы с целью регулирования напряжения, а в распределительных сетях и с целью снижения потерь электроэнергии[1]. Осуществляется с использованием компенсирующих устройств. Для поддержания требуемых уровней напряжения в узлах электрической сети потребление реактивной мощности должно обеспечиваться требуемой генерируемой мощностью с учетом необходимого резерва. Генерируемая реактивная мощность складывается из реактивной мощности, вырабатываемой генераторами электростанций и реактивной мощности компенсирующих устройств, размещенных в электрической сети и в электроустановках потребителей электрической энергии.
Компенсация реактивной мощности особенно актуальна для промышленных предприятий, основными электроприёмниками которых являются асинхронные двигатели, в результате чего коэффициент мощности без принятия мер по компенсации составляет 0,7 — 0,75. Мероприятия по компенсации реактивной мощности на предприятии позволяют:
• уменьшить нагрузку на трансформаторы, увеличить срок их службы,
• уменьшить нагрузку на провода, кабели, использовать их меньшего сечения,
• улучшить качество электроэнергии у электроприемников (за счёт уменьшения искажения формы напряжения),
• уменьшить нагрузку на коммутационную аппаратуру за счет снижения токов в цепях,
• избежать штрафов за снижение качества электроэнергии пониженным коэффициентом мощности,
• снизить расходы на электроэнергию.
7. Сosф и его увеличение. -
Полная мощность
Помимо понятий активной и реактивной мощностей в электротехнике широко
используется понятие полной мощности:
S=UI
Активная, реактивная и полная мощности связаны следующим соотношением:
S=(общий корень)P(квадрат)+Q(квадрат)
Отношение активной мощности к полной называют коэффициентом мощности.
Из приведенных выше соотношений видно, что коэффициент мощности равен косинусу угла сдвига между током и напряжением. Итак, Cos ф = P/S
8. Схемы включения резисторов.
9. Схемы включения емкостей.
.
2. Электрические Машины
1.Типы и кострукции Эл.Двигателей – Принцип действия
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части —ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
• короткозамкнутым;
• фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. Сейчас эти двигатели редкость, так как на рынке появились преобразователи частоты, ранее же они очень часто использовались в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
2. Двигатели постоянного тока-электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
1. коллекторные двигатели;
2. бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
1. двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
2. двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
1. Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
2. Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
3. Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.
Основные формулы, используемые при управлении ДПТ:
• Скорость двигателя:
ω = (U — IR)/CΦ где U — подводимое к ОЯ напряжение, I — ток ОЯ, R — сопротивление цепи якоря, С — конструктивная постоянная, Ф — поток создаваемый обмоткой возбуждения.
• Крутящий момент, развиваемый двигателем с независимым (параллельным) возбуждением, пропорционален току в обмотке якоря (ротора) (для двигателей последовательного возбуждения — момент приближённо пропорционален квадрату тока, так как поток пропорционален почти току):
M = CMΦI
• ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора b при постоянном потоке возбуждения Φ :
, где — коэффициент ЭДС двигателя, — угловая скорость вращения ротора.
Общие способы управления ДПТ:
• Изменение напряжения подводимого к обмотке якоря;
• Введение добавочного сопротивления в цепь якоря;
• Изменение потока.
3. Двигатели переменного тока-электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
• однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь;
• двухфазные — в том числе конденсаторные;
• трёхфазные;
• многофазные;
4. схема смешанного возбуждения электродвигателя постоянного тока.
5. Электродвигатель с последовательным возбуждением. Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 127, а), а для регулирования частоты вращения
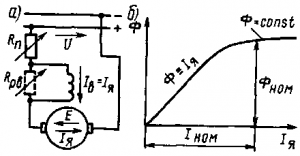
Рис. 127. Принципиальная схема электродвигателя с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
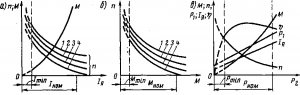
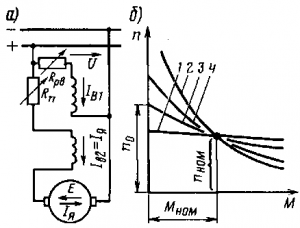
Рис. 128. Характеристики электродвигателя с последовательным возбуждением: а — скоростные и моментная; б — механические; в — рабочие
параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв. Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rрв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 127,б).
6.
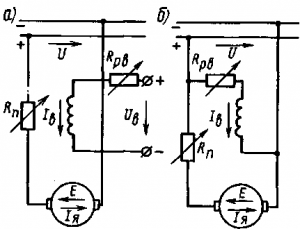 Рис.
125. Принципиальные схемы электродвигателей
с независимым (а) и параллельным (б)
возбуждением
Рис.
125. Принципиальные схемы электродвигателей
с независимым (а) и параллельным (б)
возбуждением
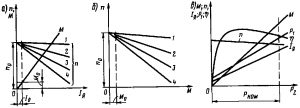 Рис.
126. Характеристики электродвигателей
с независимым и параллельным возбуждением:
а — скоростные и моментная; б —
механические; в — рабочие
Рис.
126. Характеристики электродвигателей
с независимым и параллельным возбуждением:
а — скоростные и моментная; б —
механические; в — рабочие
. Принципиальные схемы электродвигателей с независимым (а) и параллельным (б) возбуждением
. Характеристики электродвигателей с независимым и параллельным возбуждением: а — скоростные и моментная; б — механические; в — рабочие
7. Рассмотрим устройство трансформатора:
|
На замкнутом магнитопроводе, выполненном из магнитомягкой листовой стали, расположены две (или более) катушки (обмотки). К одной из обмоток подводится электрическая энергия от источника переменного тока. Эта обмотка называется первичной. От другой, вторичной, обмотки с числом витков W2 энергия отводится к приемнику. Все величины, относящиеся к этим обмоткам (токи, напряжения, мощности и т.п.) называются соответственно первичными или вторичными.
Под действием переменного напряжения U1, подведенного к первичной обмотке, в ней возникает ток I1, а в сердечнике возбуждается соответственно изменяющийся магнитный поток Ф. Этот поток пересекает витки
обеих обмоток трансформатора и индуктирует в них ЭДС:
![]() ;
; ![]()
В каждый момент времени отношение этих ЭДС пропорционально отношению количества витков обмоток:
![]()
Если цепь вторичной обмотки замкнута, то под действием ЭДС Е2
возникает ток I2.
При синусоидальном изменении напряжения питания U1 с частотой f поток в магнитопроводе Ф оказывается практически синусоидальным. Действующие значения ЭДС в обмотках можем найти по формуле:
E1 = 4,44 W1 f Фm;
E2 = 4,44 W2 f Фm.
Отношение этих ЭДС
![]()
принято называть коэффициентом трансформации. Приближенно можно принять, что ЭДС обмоток равны напряжениям на их зажимах, т.е.
![]()
Полученное равенство характеризует основное назначение трансформатора - преобразование одного напряжения в другое, большее или меньшее.
Цепи высшего и низшего напряжения электрически изолированы друг от друга и связаны лишь магнитным потоком, замыкающимся в сердечнике трансформатора. Преобразование электрической энергии в трансформаторе сопровождается весьма малыми потерями энергии: величина КПД при номинальной нагрузке изменяется в пределах 0,96 - 0,996 в зависимости от мощности трансформатора. Этим объясняется исключительно большое распространение трансформаторов в современной технике.
Однофазный трансформатор с ферромагнитным сердечником был предложен выдающимся русским изобретателем П.Н.Яблочковым в 1876 г.
8. Трехфазные трансформаторы: устройство, принцип действия
Впервые трехфазный трансформатор был предложен в 1889 г. М.О. Доливо-Добровольским. В настоящее время такие трансформаторы широко используются в трехфазных системах для преобразования напряжения. При большой мощности (порядка 10 кВА) для этой цели используют три одинаковых однофазных трансформатора. При небольшой мощности трехфазные трансформаторы имеют общий сердечник, на котором располагаются обмотки всех трех фаз, по две обмотки (первичная и вторичная) на каждом стержне. Такие трансформаторы меньше по габаритам и стоимости, чем три однофазных.

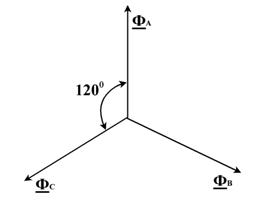
Векторы магнитных потоков в стержнях образуют симметричную звезду, их сумма равна нулю. Фазные
напряжения и ЭДС первичной стороны сдвинуты друг относительно друга по фазе на 120 . Электромагнитные процессы, протекающие в каждой фазе, аналогичны процессам, протекающим в однофазном трансформаторе.
|
Первичные и вторичные обмотки по аналогии с фазными обмотками трехфазного генератора могут соединяться в звезду или треугольник. При этом векторы линейных напряжений первичной и вторичной сторон могут и не совпадать по фазе. Для указания этого несоответствия вводится так называемый номер группы соединения трехфазного трансформатора.
9.Принцип Действия и применение преобразователя и выпрямителя переменного тока.
Выпрямитель (электрического тока) — преобразователь электрической энергии; механическое, электровакуумное, полупроводниковое или другое устройство, предназначенное для преобразования переменного входного электрического тока в постоянный выходной электрический ток.
Большинство выпрямителей создаёт не постоянные, а пульсирующие однонаправленные напряжение и ток, для сглаживания пульсаций которых применяют фильтры.
Устройство, выполняющее обратную функцию — преобразование постоянных напряжения и тока в переменные напряжение и ток — называетсяинвертором.
Из-за принципа обратимости электрических машин выпрямитель и инвертор являются двумя разновидностями одной и той же электрической машины (справедливо только для инвертора на базе электрической машины).
Классификация

Ртутный выпрямитель
Выпрямители классифицируют по следующим признакам:
по виду переключателя выпрямляемого тока
механические синхронные с щёточноколлекторным коммутатором тока[3];
механические синхронные с контактным переключателем (выпрямителем) тока;
с электронной управляемой коммутацией тока (например, тиристорные);
электронные синхронные (например, транзисторные) — как разновидность выпрямителей с управляемой коммутацией;
с электронной пассивной коммутацией тока (например, диодные);
по мощности
силовые выпрямители[4];
выпрямители сигналов[5];
по степени использования полупериодов переменного напряжения
однополупериодные — пропускают в нагрузку только одну полуволну[6];
двухполупериодные — пропускают в нагрузку обе полуволны;
неполноволновые — не полностью используют синусоидальные полуволны;
полноволновые — полностью используют синусоидальные полуволны;
по схеме выпрямления — мостовые, с умножением напряжения, трансформаторные, с гальванической развязкой, бестрансформаторные и пр.;
по количеству используемых фаз — однофазные, двухфазные, трёхфазные и многофазные;
по типу электронного вентиля — полупроводниковые диодные, полупроводниковые тиристорные, ламповые диодные (кенотронные), газотронные, игнитронные, электрохимические и пр.;
по управляемости — неуправляемые (диодные), управляемые (тиристорные);
по количеству каналов — одноканальные, многоканальные;
по величине выпрямленного напряжения — низковольтные (до 100В), средневольтовые (от 100 до 1000В), высоковольтные (свыше 1000В);
по назначению — сварочный, для питания микроэлектронной схемы, для питания ламповых анодных цепей, для гальваники и пр.;
по степени полноты мостов — полномостовые, полумостовые, четвертьмостовые;
по наличию устройств стабилизации — стабилизированные, нестабилизированные;
по управлению выходными параметрами — регулируемые, нерегулируемые;
по индикации выходных параметров — без индикации, с индикацией (аналоговой, цифровой);
по способу соединения — параллельные, последовательные, параллельно-последовательные;
по способу объединения — раздельные, объединённые звёздами, объединённые кольцами;
по частоте выпрямляемого тока — низкочастотные, среднечастотные, высокочастотные.
10.Измерительные трансформаторы.
Измерительный трансформатор — электрический трансформатор для контроля напряжения, тока или фазы сигнала первичной цепи. Измерительный трансформатор рассчитывается таким образом, чтобы оказывать минимальное влияние на измеряемую (первичную) цепь; минимизировать искажения пропорции и фазы измеряемого сигнала в измерительной (вторичной) цепи.