

25 Усилительный каскад на биполярных транзисторах: основные схемы (оэ, об, ок), статический и динамический режим работы.
По названию того электрода транзистора, который используется как общая точка для напряжений входного и выходного сигналов, различают три основные схемы усилителей на биполярных транзисторах:
с общим эмиттером (ОЭ),
с общим коллектором (ОК),
с общей базой (ОБ).
Усилитель с общей базой. Среди всех трех конфигураций обладает наименьшим входным и наибольшим выходным сопротивлением. Имеет коэффициент усиления по току, близкий к единице, и большой коэффициент усиления по напряжению. Фаза сигнала не инвертируется.
Усилитель с общим коллектором. Обладает наивысшим входным и наименьшим выходным сопротивлением. Усиление по напряжению, как правило, близко к единице. Коэффициент усиления по мощности обычно самый низкий, но коэффициент усиления по току самый высокий. Фаза сигнала не инвертируется. Используется главным образом как буферный усилитель. (Такой усилитель называют также эмиттерным повторителем.)
Усилитель с общим эмиттером. Входное и выходное сопротивления этой конфигурации имеют промежуточные величины по сравнению с другими конфигурациями. Коэффициент усиления по напряжению почти такой же, как у схемы с общей базой, а коэффициент усиления по току почти столь же большой, как у схемы с общим коллектором; в результате данная конфигурация обычно дает наивысший коэффициент усиления по мощности. Фаза сигнала меняется на 180
Различают два режима работы системы: статический и динамический.
Статическим режимом называют такое состояние системы, при котором управляемая величина и все промежуточные величины не изменяются во времени.
Зная статические характеристики отдельных звеньев, можно построить статическую характеристику АСР. Если все звенья АСР линейные, то АСР имеет линейную статическую характеристику и называется линейной. Если хотя бы одно звено нелинейное, то АСР нелинейная.
Звенья, для которых можно задать статическую характеристику в виде жесткой функциональной зависимости выходной величины от входной, называются статическими. Если такая связь отсутствует и каждому значению входной величины соответствует множество значений выходной величины, то такое звено называют астатическим и изображать его статическую характеристику бессмысленно.
В динамическом режиме управляемая величина непрерывно изменяется во времени. Динамические режимы подразделяются на неустановившейся и установившейся.
Неустановившейся динамический режим имеет место сразу после изменения внешних воздействий. Вид переходного процесса зависит от типа воздействий и от динамических свойств системы.
Установившейся динамический режим наступает сразу после окончания переходного процесса, когда выходная величина изменяется во времени по тому же закону, что и входная.
Установившейся динамический режим не является характерным для АСР. Обычно, на управляемый процесс действуют различные возмущения, отклонеящие управляемый параметр от заданной величины.
Процесс установления требуемого значения управляемой величины называется регулированием. Ввиду инерционности звеньев регулирования не может осуществляться мнгновенно.
Рассмотрим АСР, находящуюся в установившемся режиме, характеризующемся значением выходной величины y=y0. Пусть в момент времени t=0 на объект воздействовал какой-либо возмущающий фактор, отклонив значение регулируемой величины. Через некоторое время регулятор вернет АСР к первоначальному остоянию с учетом статической точности.
При резких возмущениях возможен колебательный затухающий процесс (рисунок 1).
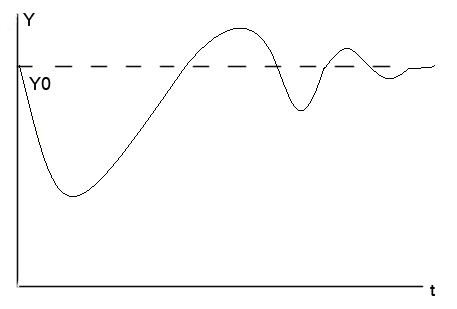
Рисунок 1 - Затухающий колебательный процесс
Существует и такая вероятность, что после некоторого времени Tp в системе установятся незатухающие колебания регулируемой величины - незатухающий колебательный процесс (рисунок 2).

Рисунок 2 - Незатухающие колебания
Последний вид - расходящийся колебательный процесс (рисунок 3).

Рисунок 3 - Расходящийся колебательный процесс
Таким образом, основным режимом работы АСР считается динамический режим, характеризующийся протеканием в ней переходных процессов. Поэтому одной из основных задач теории автоматического управления является анализ динамических режимов работы АСР.
Поведение АСР или любого ее звена в динамических режимах описывается уравнением динамики y(t)=F(u,t,f), описывающее изменение величин во времени. Как правило, это дифференциальное уравнение или система дифференциальных уравнений. Поэтому основным методом исследования АСР в динамических режимах является метод решения дифференциальных уравнений. Порядок дифференциальных уравнений может быть довольно высоким, то есть зависимостью связаны как сами входные и выходные величины u(t), f(t), y(t), так и скорости их изменения, ускорения и т.д.