

2 Кинематика поступательного движения
Рассмотрим движение материальной точки вдоль произвольной кривой (рисунок 2).
Перемещение
![]() –
вектор, соединяющий начальную (1) и
конечную (2) точки траектории, по которой
двигалась материальная точка некоторый
промежуток времени. Траектория
–
линия, описываемая при движении
материальной точкой в пространстве. В
зависимости от формы траектории
движение бывает прямолинейным или
криволинейным.
–
вектор, соединяющий начальную (1) и
конечную (2) точки траектории, по которой
двигалась материальная точка некоторый
промежуток времени. Траектория
–
линия, описываемая при движении
материальной точкой в пространстве. В
зависимости от формы траектории
движение бывает прямолинейным или
криволинейным.
Путь – сумма длин отрезков траектории.

Рисунок 2 – Определение пути и перемещения
При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории и модуль перемещения равен пройденному пути Δs.
Для характеристики движения материальной точки вводится векторная величина – скорость, которая определяет быстроту и направление движения. Модуль скорости равен производной пути по времени:
![]() .
(1.2)
.
(1.2)
Мгновенная скорость направлена по касательной к траектории. В системе СИ скорость измеряется в м/с.
Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение:
![]() (1.3)
(1.3)
Скорость тела может изменяться как по величине (модулю), так и по направлению. Вектор ускорения принято представлять в виде двух составляющих: тангенциальной и нормальной (Рисунок 3).
Тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю:
![]() .
(1.4)
.
(1.4)
Тангенциальное ускорение направлено по касательной к траектории параллельно вектору скорости в случае ускоренного движения и в противоположную сторону в случае замедленного.
Нормальная составляющая ускорения характеризует быстроту изменения скорости по направлению. Нормальное ускорение направлено к центру кривизны траектории и численно равно
![]() ,
(1.5)
,
(1.5)
где R радиус кривизны траектории в данной точке.
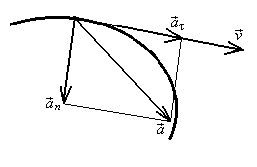
Рис.4
Рисунок 3 – Определение составляющих ускорения
(движение ускоренное)
Векторы нормального и тангенциального ускорений направлены перпендикулярно друг другу. Вектор полного ускорения
![]() ,
,
![]() , (1.6)
, (1.6)
В зависимости от значений тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1) аτ=0, аn=0 − прямолинейное равномерное движение;
2) аτ=а=const, аn=0 − равнопеременное прямолинейное движение. Можно показать, что при таком движении справедливы соотношения:
v=v0±at, s=v0t±at2/2. (1.7)
Здесь знак «плюс» берется в случае равноускоренного движения, а знак «минус» − в случае равнозамедленного движения.
3) аτ= f(t), аn=0 − прямолинейное движение с переменным ускорением;
4) аτ=0, аn=const − движение по окружности с постоянным численным значением скорости.
Существуют более сложные типы движения, примеры которых будут рассмотрены на практических занятиях.
3 Кинематика вращательного движения
При вращательном движении твердого тела вокруг неподвижной оси все точки тела описывают окружности разных радиусов, центры которых находятся на оси вращения. Все точки тела движутся с разными линейными скоростями и ускорениями и проходят за одно и то же время разные пути. При этом угол поворота, угловая скорость и угловое ускорение для всех точек тела оказываются одинаковыми.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
![]() (1.8)
(1.8)
где угол поворота. Направление угловой скорости определяется по правилу правого винта (рисунок 4). В СИ угловая скорость измеряется в рад/с.
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
![]() (1.9)
(1.9)
Направление вектора углового ускорения определяется по следующему правилу: при ускоренном движении направление углового ускорения совпадает по направлению с направлением угловой скорости, а при замедленном движении направление угловой скорости антипараллельно направлению угловому ускорению.
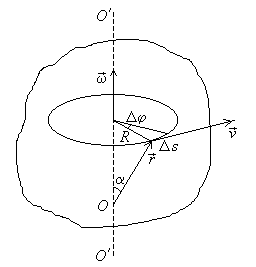
Рисунок 4 – Вращение тела вокруг неподвижной оси
Если угловая скорость ω постоянна, то вращение является равномерным и его можно характеризовать периодом вращения T – временем, за которое точка совершает один полный оборот. Легко показать, что T=2π/ω.
Число полных оборотов, совершаемых телом за единицу времени, называется частотой вращения n.
N=1/ T= ω/(2 π), ω=2πn. (1.10)
При вращении с постоянным угловым ускорением справедливы соотношения
ω=ω0±εt, φ=ω0t±εt2/2. (1.11)
Обращаем внимание на аналогию соотношений (1.11) и (1.7).