

5.3 Газосепаратори
Ще одним видом додаткового обладнання при експлуатації нафтових свердловин за допомогою штангових насосів є газосепаратори.
Також, як і у випадку роботи установок відцентрових насосів, газосепаратори забезпечують зменшення поступлення вільного газу на прийом свердловинного штангового насоса. Як вже зазначалося вище, штангові насоси звичайного виконання не повинні мати на прийомі вільного газу більше
10 %, насоси спеціального виконання - більше 25 %. Часто геолого-технічні умови експлуатації нафтових свердловин не дозволяють забезпечувати вказану кількість вільного газу за рахунок глибини спуску, що потребує використання газосепараторів.
Всі газосепаратори мають подібний принцип дії – при повороті потоку газорідинної суміші за рахунок різної густини газу і рідини відбувається розділення потоку. Після цього більш легкий газ відводиться по спеціальних каналах в затрубний простір, а потік рідини подається на прийом насоса.
Практично всі газосепаратори при розділенні потоків рідини і газу також виділяють із потоку рідини механічні домішки. Це виділення відбувається також через різну густину рідини (ρ = 800 - 1200 кг/м3) і механічних домішок (ρ = 2500 - 4300 кг/м3). Для збору відділених механічних домішок (пісок та інші складові продуктивного пласта, а також іржа із свердловинного обладнання) в газосепараторах передбачені контейнери. Контейнери виготовлені із насосно-компресорних труб і мають заглушку в нижній частині. Верхня частина контейнера приєднана за допомогою різьби до нижньої частини газосепаратора. Кількість насосно-компресорних труб та їх об’єм залежить від кількості механічних домішок у відкачуваній пластовій рідині і запланованому наробітку на відмову свердловинного обладнання.
Контрольні запитання
1 Яке призначення центраторів та протекторів?
2 Яке призначення свердловинних амортизаторів?
3 В яких випадках під час експлуатації свердловин з допомогою ШСНУ використовують газові сепаратори?
4 Опишіть конструкції свердловинних газових сепара-торів.
6 Кінематичний розрахунок балансирного приводу (верстата-качалки)
Кінематичний розрахунок ВК дозволяє визначити як на протязі подвійного ходу змінюються величини переміщення, швидкості і прискорення точки підвісу штанг.
Перетворюючий механізм ВК представляє простий плоский механізм І класу другого порядку (рис. 6.1).

Рисунок 6.1 – Кінематична схема перетворюючого механізму
Позначимо: кривошип відрізком ОА довжиною r, шатун відрізком АВ довжиною l, плечі балансира – переднє відрізком ДС довжиною K1 і заднє – відрізком СД довжиною K.
В даний час відомі три способи визначення законів руху елементів ВК, які відрізняються підходом до аналізу перетворюючого механізму. Ці способи залежно від прийнятих припущень дозволяють з різною ступінню точності знайти закон зміни переміщення, швидкості і прискорення точки підвісу штанг.
1) Так звана елементарна теорія базується на таких припущеннях:
- перетворюючий механізм розглядається як кривошипно-шатунний
![]() .
.
Звідси виходить,
що т. В
рухається по прямій В1В2,
а ![]()
Зміна переміщення, швидкості і прискорення точки підвісу штанг при цих припущеннях буде здійснюватись за гармонійним законом.
2) Наближена методика
базується на припущенні, що ![]() ,
траєкторія руху т. В
– пряма,
,
траєкторія руху т. В
– пряма, ![]() ,
тобто враховується кінцева довжина
шатуна, так як при значній довжині
ходу
,
тобто враховується кінцева довжина
шатуна, так як при значній довжині
ходу
(4-6 м) відношеннях
![]() стає значною величиною.
стає значною величиною.
3) При точних
розрахунках враховують кривизну руху
точки В, що дозволяє зменшити похибку
при розрахунку.
,![]()
![]() = const.
= const.
Точні закони переміщення, швидкості і прискорення точки підвісу штанг можуть бути отримані двома способами: аналітичним і графічним.
Знайдемо закономірності на основі припущень, які відповідають наближеній методиці.
Довжина шляху Sв,
який пройшла т. В
при повороті кривошипу на кут ![]() рівна відрізку В1В.
Спроектувавши т. А
на вертикаль В1О,
маємо
рівна відрізку В1В.
Спроектувавши т. А
на вертикаль В1О,
маємо
В1О = ОВ1 +ОВ,
де В1О = r + l, а величина ВО = Оа + аВ;
Величини значень Оа і аВ можна знайти із прямокутних трикутників ВАа і ОАа.
аВ =
l∙cos![]() ,
Оа = r∙cos
,
,
Оа = r∙cos
,
Тоді:
Sв
= r+
![]() –
(r∙cos
+ l∙cos
)
= r(1 – cos
–
(r∙cos
+ l∙cos
)
= r(1 – cos![]() )
+
(1
– cos
),
)
+
(1
– cos
),
За теоремою синусів для ∆ ОАВ
![]() ,
звідки
,
звідки ![]() .
.
Так як cos![]() .
.
cos![]() ,
,
то підставивши значення синуса і використовуючи наближену формулу для добування кореня, отримаємо
cos![]()
![]() .
.
Підставивши
отримане значення у вихідну формулу
для Sв
і замінивши ![]()
![]() cos
cos![]()
![]() cos
cos![]()
![]() .
.
Швидкість руху т.В можна визначити, якщо взяти похідну
U![]() ,
,
![]()
Прискорення
отримаємо диференціюванням
U![]()
W![]() ).
).
Переміщення, швидкість і прискорення для т. Д знаходимо із врахуванням плеч балансира K1 і K.
![]() ,
,
S![]() cos
cos
![]() , (6.1)
, (6.1)
U![]()
![]() , (6.2)
, (6.2)
![]() cos
cos![]()
![]() .
(6.3)
.
(6.3)
Отримані формули
досить прості і можуть використовуватись
для наближених обчислень з достатньою
для практики точністю. З їх допомогою
неважко визначити, що максимальний шлях
![]() ,
тобто S
,
тобто S![]() ,
що максимальне значення швидкість
U
,
що максимальне значення швидкість
U![]() досягає при
досягає при
![]() ,
і буде рівна
,
і буде рівна
U![]() .
.
Максимальне
прискорення буде при ![]()
![]() .
.
Рівняння (6.1,6.2,6.3)
описують закон руху точки підвісу штанг
при допущеннях, що траєкторія руху т. В
– пряма. Якщо знехтувати і величиною
відношення ![]() ,
як це робиться в елементарній методиці,
то із отриманих залежностей після
підстановки в них
,
як це робиться в елементарній методиці,
то із отриманих залежностей після
підстановки в них ![]() ,
отримаємо
,
отримаємо
S![]() cos
cos![]() , (6.4)
, (6.4)
U![]() , (6.5)
, (6.5)
![]() cos
cos![]() . (6.6)
. (6.6)
Із аналізу цих залежностей виходить, що для балансирного ВК, у якого довжина радіуса кривошипа дуже мала в порівнянні з довжиною шатуна і балансира, закон руху підвісу штанг є гармонійним.
Гармонійний закон руху точки підвісу штанг – своєрідний еталон, з яким порівнюють фактичні закони руху точок підвісу штанг, які відрізняються від гармонійного в силу кінцевих довжин елементів перетворюючого механізму і ряду інших факторів, наприклад нерівномірності обертання кривошипа. Вплив співвідношення довжин елементів перетворюючого механізму може бути проілюстровано відношенням максимального прискорення т. Д, яке визначається за формулою (6.3) до максимального прискорення при гармонійному русі (формула (6.6).
m![]() (1
(1![]() )
– коефіцієнт кінематичної доскона-лості.
)
– коефіцієнт кінематичної доскона-лості.
Таким чином, навіть
при аналізі наближених формул можна
переконатись, що закон руху точки підвісу
відрізняється від гармонійного в сторону
збільшення максимальних прискорень.
Причому ця відмінність тим більша, чим
більше співвідношення ![]()
Для визначення показника m зручно користуватись формулою Алівердізаде К.С.
m .
.
В залежності від
глибини підвіски насоса величина m![]() .
змінюється і
для глибоких свердловин повинна бути
m
.
змінюється і
для глибоких свердловин повинна бути
m
![]()
Чим більше реальний чотириланковий механізм відрізняється від ідеального, тобто чим коротше у нього шатун і заднє плече балансира (при даній незмінній довжині ходу), тим гірші експлуатаційні властивості, так як при цьому:
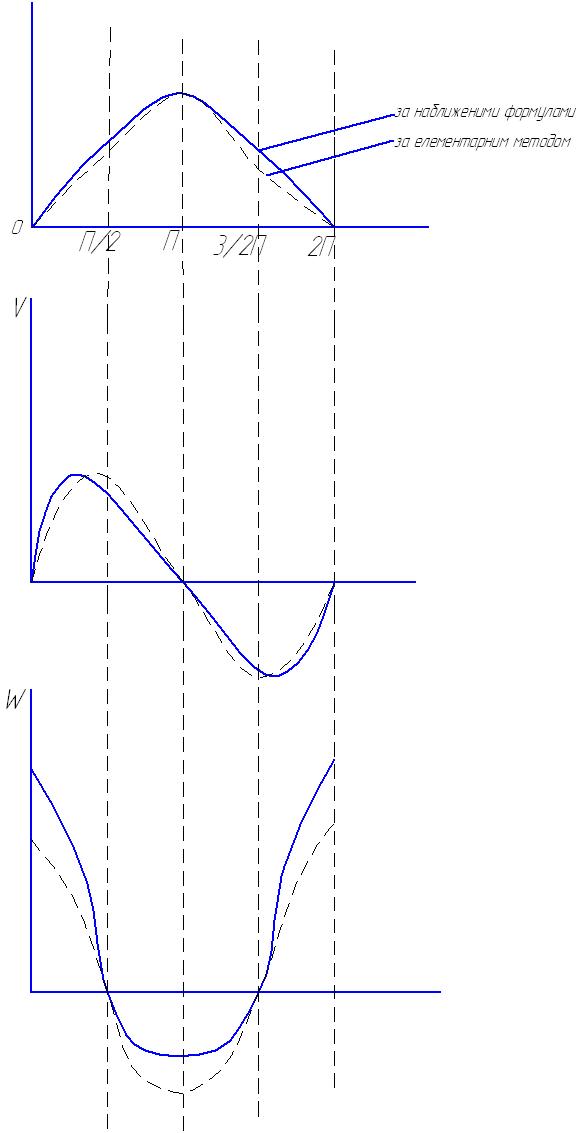
Рисунок 6.2 – Залежність переміщень (а), швидкості (б), прискорення (в) від кута повороту кривошипа φ
- зростають зусилля, які виникають в ланках і шарнірах механізму (шатуні, кривошипному пальці, на опорі кривошипного вала і т.д.), що призводить до посиленого зношення деталей ВК;
-
зростають екстремальні значення крутного
моменту (![]() )
на кривошипному валу і в результаті
посилюється знос зубів всіх шестерень
і підшипників редуктора, а також пасової
передачі електродвигуна.
)
на кривошипному валу і в результаті
посилюється знос зубів всіх шестерень
і підшипників редуктора, а також пасової
передачі електродвигуна.
Таким чином, чим
менше відношення ![]() і
і
![]() ,
тим краще повинна працювати установка,
але при цьому значно збільшуються
габаритні розміри ВК; чим менше
,
тим краще повинна працювати установка,
але при цьому значно збільшуються
габаритні розміри ВК; чим менше ![]() ,
тим більша висота ВК і чим менше
,
тим більша висота ВК і чим менше ![]() ,
тим більша його довжина.
,
тим більша його довжина.
Звідси збільшується
металоємкість ВК, збільшуються розміри
його фундаменту і вартість монтажних
робіт. Наприклад: якщо замість ![]() і
і ![]() 5
прийняти
5
прийняти ![]() і
3,
то висота ВК збільшується на 60 %, а довжина
станини (рами) – на 70 %.
і
3,
то висота ВК збільшується на 60 %, а довжина
станини (рами) – на 70 %.
Таким чином, з
однієї сторони з наближенням кінематичної
схеми ВК до ідеальної, експлуатаційні
властивості ВК покращуються і витрати
на експлуатацію знижуються, а з другої
сторони ростуть капітальні вклади
(вартість ВК і його фундаменту). Звідси
виходить, що для вибору оптимальних
значень
і
![]() потрібно знайти, використовуючи і
розрахункові дані про зношення деталей
ВК з різними значеннями
і
,
суми експлуатаційних і капітальних
затрат. Значення
і
,
при яких вони мінімальні, і будуть
оптимальними. При проектуванні вітчизняних
ВК
і
для максимальних довжин ходу
потрібно знайти, використовуючи і
розрахункові дані про зношення деталей
ВК з різними значеннями
і
,
суми експлуатаційних і капітальних
затрат. Значення
і
,
при яких вони мінімальні, і будуть
оптимальними. При проектуванні вітчизняних
ВК
і
для максимальних довжин ходу![]() і
5.
Ці умови диктувались міркуваннями
економії капітальних вкладень, без
врахування економічних експлуатаційних
затрат.
і
5.
Ці умови диктувались міркуваннями
економії капітальних вкладень, без
врахування економічних експлуатаційних
затрат.
Якщо порівнювати дві кінематичні схеми, звичайну і більш досконалу, то, як показав аналіз, вибір більш досконалої схеми дає невеликий виграш у зниженні додаткових навантажень в шарнірах і ланках, що і послужило в свій час одним із аргументів для введення в стандарт і 5.
При виборі показників
досконалості чотириланкового механізму
потрібно приймати до уваги, що зношення
підшипників кочення в шарнірах
пропорціонально діючому на них
навантаженню в степені ![]() 3.
Тому, якщо зусилля збільшується на 5 %,
то зношення
на
16 %.
3.
Тому, якщо зусилля збільшується на 5 %,
то зношення
на
16 %.
Немаловажне значення в теорії і практиці глибинно-насосної експлуатації має вплив ступеня досконалості чотириланкового механізму на роботу штанг.
В процесі розгляду відхилень величин швидкостей і прискорень від ідеальних значень при максимальних і мінімальних зусиллях в штангах за цикл дії насоса виявилось, що до значень і 5 вплив цей не значний і ним можна нехтувати.
При збільшенні показників за межі вищевказаних значень максимальні навантаження на штанги зростають, а мінімальні – знижуються, що погіршує умови роботи штанг.
Контрольні запитання
1 Яка основна мета кінематичного розрахунку верстата-качалки?
2 Приведіть залежності для визначення переміщення, швидкості та прискорення точки підвісу насосних штанг.
3 Дайте визначення коефіцієнта кінематичної досконалості.
4 Приведіть формули для визначення коефіцієнта кінематичної досконалості верстата-качалки.
5 Яке оптимальне
значення співвідношень
![]()
6 Поясніть вплив
співвідношень
![]() на експлуатаційні характеристики
верстатів-качалок.
на експлуатаційні характеристики
верстатів-качалок.