

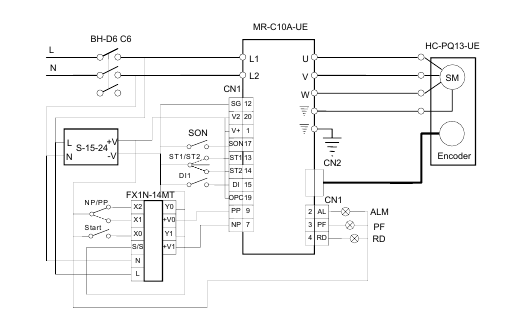
6. Настройка системы регулирования
Обобщенная
линеаризованная структурна схема
электропривода, показанного на рисунке
2 приведена не рисунке 3 [4]. Схема содержит
два одинаковых по параметрам внутренних
контура регулирования составляющих
и
тока статора с коэффициентом обратной
связи по потокосцеплению ![]() и внешний контур регулирования скорости
двигателя с коэффициентом обратной
связи
и внешний контур регулирования скорости
двигателя с коэффициентом обратной
связи ![]()
Схема также содержит внешний контур регулирования положением.
При настройке контуров регулирования на модульный оптимум определение параметров передаточных функций регуляторов тока потокосцепления, скорости и положения:
Коэффициенты структурной схемы:
- коэффициент обратной
связи по току ![]() ;
;
- коэффициент обратной
связи по скорости ![]() ;
;
- коэффициент обратной
связи по потокосцеплению ![]() ;
;
- эквивалентный статический коэффициент передачи преобразователя
![]() ;
;
- коэффициент
электромагнитной связи ротора ![]() ;
;
- эквивалентная постоянная времени цепи статора ;
- электромагнитная
постоянная времени цепи ротора ![]() ;
;
- эквивалентная постоянная времени цепи управления преобразователем
![]() ;
;
- эквивалентное сопротивление цепи статора ;
- соотношение
постоянных времени контуров ![]() ;
;
- взаимная индуктивность
обмоток статора и ротора ![]() ;
;
- индуктивность
обмотки ротора ![]() .
.
Определим параметры регуляторов.
Передаточный коэффициент пропорциональной части регулятора тока
где – постоянная времени интегрирования регулятора тока, с:
Передаточный коэффициент пропорциональной части регулятора потокосцепления ротора
где ![]() – постоянная времени интегрирования
регулятора потокосцепления ротора, с:
– постоянная времени интегрирования
регулятора потокосцепления ротора, с:
Передаточный коэффициент регулятора скорости
где ![]() – суммарный момент инерции двигателя
и механизма,
– суммарный момент инерции двигателя
и механизма, ![]() ,
равный
,
равный
![]()
где ![]() – суммарный момент инерции конвейера,
:
– суммарный момент инерции конвейера,
:
![]()
![]()
Принципиальная схема:
Смоделируем структуру в пакете eDrive. Графики переходных процессов показаны на рисунках 3 и 4.
Исследуем систему при перемещении заготовки по конвейеру на 10 м.
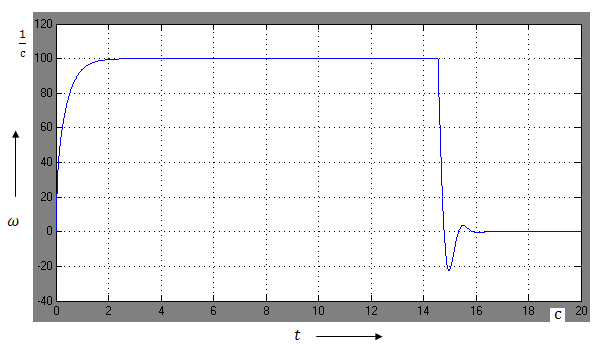
Рисунок 3 – Зависимость скорости перемещения от времени
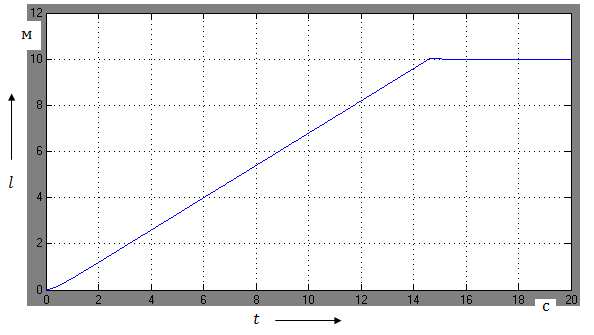
Рисунок 4 – Зависимость положения от времени
Заключение
Целью моделирования являлось то, чтобы проверить систему на устойчивость, а также удовлетворяет ли она качеству переходных процессов, времени переходного процесса, величине перерегулирования, отклонению частоте вращения двигателя – статической ошибке.
Согласно требованиям, предъявляемые к электроприводу конвейеров:
1. Регулирование скорости не требуется или требуется в небольшом диапазоне.
2. Требуется повышенный пусковой момент из-за большего по величине момента трения покоя относительно момента трения движения.
3. Необходимо обеспечение плавности переходных процессов – ограничение ускорения и рывка с целью исключения раскачивания или пробуксовки механизма и снижения динамических усилий при наличии упругих связей.
Из диаграмм переходных процессов видно, что автоматическая система удовлетворяет требованиям, предъявляемым к главным приводам конвейеров.
Время переходного процесса при разгоне и торможении двигателя равно 2 с. За это время двигатель достигает заданного значения угловой частоты вращения.
Также из диаграмм видно, что через 15,6 с перемещение заготовки достигло заданного значения – 10 м.
Таким образом, можно сделать вывод, что данная автоматическая система обеспечивает устойчивость а также качество и быстроту протекания переходных процессов, при регулировании скорости и тока в заданных пределах.
Список использованных источников
1. Водовозов В.М. Курсовое проектирование электропривода / В.М. Водовозов. – СПбГЭТУ «ЛЭТИ», 2013. – 30 с.
2. Соколов М.М. Автоматизированный электропривод общепромышленных механизмов / М.М. Соколов. – М: Энергия, 2011. – 488 с.
3. Трехфазные асинхронные электродвигатели с короткозамкнутым ротором АИР, А: листок-каталог: производитель: ОАО Ярославский электромоторный завод - ОАО ELDIN.
4. Преобразователи частоты для асинхронных двигателей: каталог: Schneider Electric.
5. Системы управления электроприводов / Под общей редакцией В.М. Терехова. – М.: Академик, 2012. – 296 с.
Размещено на