

Международный кодекс по управлению безопасностью судов и защите среды (мкуб).
Кодекс нацелен на обеспечение безопасности на море,предотвращение человеческого травматизма или жертв, избежание ущерба окружающей среды и имущества. Каждая Комапния должна разрабатывать, проетворять в жизнь и поддерживать систему управления безопасностью(СУБ).
СУБ включает:
-политику безопасности и защиты окружающей среды,
-инструкции и процедуры, обеспечивающие безопасное использование судов и защиту окружающей среды в соответствии с требованиями международного законодательства и законами страны флага,
-определение уровней полномочий и способов взаимодействия внутри берегового и судового персонала,
-процедуры сообщения о происшествиях и несоответствиях МКУБ,
-процедуры подготовки к возможным экстремальным ситуациям и реагирование на них,
-процедуры внутренних проверок и изменений в управлении.
Каждая Компания должна определить политику безопасности и защиты окружающей среды, которую будет выполнять весь персонал, как на берегу, так и на судах. Проверки проводятся соответствующими организациями с определенной периодичностью, проверяются компании и суда. Администрация выдает Компании документ о соответствии МКУБ, а судну-свидетельство об управлению безопасностью. Эти документы выдаются на 5 лет.
Компания должна обеспечить чтобы капитан имел надлежащую квалификацию, был полностью осведомлен о СУБ Компании, получал всю необходимую поддержку для безопасного выполнения своих обязаннностей. Компания должна укомплектовать судно квалифицированными, дипломированными и годными в медицинском отношении моряками.
Участки земной поверхности, которые можно заменить плоскостью без введения поправки за искажение
 Если
бы все измерения на местности и графические
построения на картах выполнялись
абсолютно точно, то, безусловно, никакие
участки поверхности Земли нельзя было
бы принимать за плоскость, и, следовательно,
для решения гидрографических задач
нельзя было бы употреблять формулы
аналитической геометрии на плоскости.
Если
бы все измерения на местности и графические
построения на картах выполнялись
абсолютно точно, то, безусловно, никакие
участки поверхности Земли нельзя было
бы принимать за плоскость, и, следовательно,
для решения гидрографических задач
нельзя было бы употреблять формулы
аналитической геометрии на плоскости.
Между тем как сами измерения, так и графические построения всегда сопряжены с рядом погрешностей. Если мы заменим, например, решение задачи на сфере решением на плоскости и допустим при этом ошибку, меньшую, чем погрешность измерений, то этим самым будет доказана возможность замены сферы плоскостью на участке наших работ.
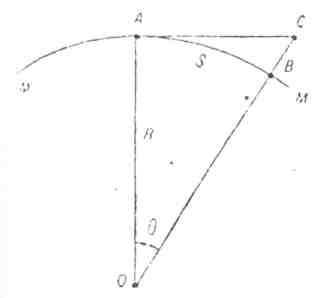
Пусть Земля — шар с центром в точке О (рис. 8). На дуге ММ этой сферы нами измерено расстояние AB = S. Если вместо сферической поверхности взять горизонтальную (в точке А) плоскость, то проекцией точки В на эту плоскость будет точка С. Разница между расстояниями АС — АВ = ΔS и будет искомой погрешностью. Из рассмотрения рис. 8 следует, что


(10.1)
Так как расстояние S практически невелико по сравнению с R и, значит, угол θ мал, разложим tgθ в ряд:
(10.2)

Ограничимся вторыми членами разложения, тогда

(10.3)
но

отсюда

(10.4)
Решим равенство (10. 4) относительно S, понимая под ΔS максимальную ошибку, которую мы еще вправе допустить

(10.5)
Формула (10.5) позволяет рассчитать предельные расстояния, при которых земную поверхность можно полагать плоской, не допуская при этом ошибок, больших ΔS.
Графические построения осуществляются обычно на картах или планшетах, составленных в какой-либо проекции. Поэтому будем отыскивать предельные расстояния, допускающие решение на плоскости, учитывая свойства проекции. Это значит, что земную поверхность можно считать плоской лишь до тех пор, пока искажения, вносимые способом проектирования, не превышают точности графических построении на карте данного масштаба.
Так, известно, что поправки расстояний за переход со сферы на плоскость в проекции Гаусса выражаются формулой

(10.6)
При точных решениях стремятся, чтобы эта погрешность не превышала ошибки графических построений. Решим формулу (10.6) относительно S

(10.7)
Если под ΔS
в данном выражении понимать допустимую
погрешность, то расстояние S
окажется тем предельным расстоянием,
при котором решение задачи на плоскости
не приведет к ошибкам, большим заданной.
Полагая, как и ранее, R
= 6370 км, а
 км, получим
км, получим

(10.8)
кмгде С0 — знаменатель масштаба карты;
y —ордината средней точки на данном расстоянии.