

Решение прямой и обратной геодезической задачи на плоскости.
В геодезии есть две стандартные задачи: прямая геодезичеcкая задача на плоскости и обратная геодезическая задача на плоскости.
Прямая геодезическая задача - это вычисление координат X2, Y2 второго пункта, если известны координаты X1, Y1 первого пункта, дирекционный угол α и длина S линии, соединяющей эти пункты. Прямая геодезическая задача является частью полярной засечки.
![]()
Обратная геодезическая задача - это вычисление дирекционного угла α и длины S линии, соединяющей два пункта с известными координатами X1, Y1 и X2, Y2 (рис. 1).
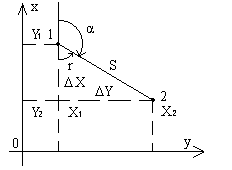
Рис. 1
Построим на отрезке 1-2 как на гипотенузе прямоугольный треугольник с катетами, параллельными осям координат. В этом треугольнике гипотенуза равна S, катеты равны приращениям координат точек 1 и 2 ( ΔX = X2 - X1, ΔY = Y2 - Y1 ), а один из острых углов равен румбу r линии 1-2.
Если Δ X
![]() 00
и Δ Y
00,
то решаем треугольник по известным
формулам:
00
и Δ Y
00,
то решаем треугольник по известным
формулам:
![]()
![]()
Для данного рисунка направление линии 1-2 находится во второй четверти, поэтому находим:
![]()
Общий порядок нахождения дирекционного угла линии 1-2 включает две операции:
определение номера четверти по знакам приращений координат Δ>X и ΔY (рис. 1.4-а),
вычисление α по формулам связи (1.22) в соответствии с номером четверти.
Контролем правильности вычислений является выполнение равенства:
![]()
Если ΔX = 0.0 , то
S = ΔY;
и α = 90o 00' 00" при ΔY > 0 ,
α = 270o 00' 00" при ΔY < 0 .
Если ΔY = 0.0 , то
S = ΔX
и α = 0o 00' 00" при ΔX > 0 ,
α = 180o 00' 00" при ΔX < 0 .
Авторулевые «атр» и «аист».
Авторулевой типизированного ряда АТР устанавливается только на судах новой постройки, оборудованных электрогидравлическими рулевыми машинами типизированного ряда.
В систему АТР входит пульт управления — основной прибор, с помощью которого производится управление судном в автоматическом, следящем и простом режимах, а также настройка системы в процессе эксплуатации.
Пульт следящего управления—прибор, с помощью которого производится управление судном при следящем и простом режимах работы. Он устанавливается в кормовом запасном посту управления судном.
Исполнительный механизм (ИМ-1), предназначенный для управления насосом переменной производительности, или ИМ-2 — управляющий золотниковым устройством насосного агрегата постоянной производительности. ИМ устанавливается в румпельном отделении. Рулевой датчик, механически связанный с баллером руля, вырабатывает сигналы внутренней отрицательной обратной связи.
Особенность системы АТР состоит в том, что она составляет единый комплекс с рулевой машиной типизированного ряда.
Вычислительная схема авторулевого АТР собрана на бесконтактных сельсинах типа БС-404А и имеет два полностью дублированных канала управления, что значительно повышает ее надежность.
В системе предусмотрены три режима управления: простой, следящий и автоматический. Следящее управление и ввод градусных поправок к заданному курсу осуществляются поворотом штурвала, а простое дистанционное управление — путем нажатия специальных клавиш.
В авторулевом предусмотрен автоматический возврат штурвала в нулевое положение при следящем режиме, что облегчает управление судном вручную.
При эксплуатации системы АТР в режимах «следящий» и «простой» рекомендуется запускать оба насоса рулевого привода, что увеличивает скорость перекладки руля и повышает надежность рулевого управления.
При работе в режиме «Автомат» следует периодически переключать систему с одного насоса на другой для равномерной эксплуатации оборудования.
Подробно устройство системы АТР дано в эксплуатационной документации, имеющейся на судне.
Авторулевой «Аист» предназначен для установки на кораблях и судах, имеющих электрогидравлические рулевые машины. Авторулевой подключается к репитерной передаче гирокомпаса или дистанционного магнитного компаса. В комплект авторулевого «Аист» входят следующие приборы: пульт управления (ПУ), пульт следящего управления (ПСУ), переключатель пультов (10-ПП), исполнительный механизм (ИМ-1 или ИМ-2), рулевой датчик (РД).в комплект также входит набор запасных частей и приспособлений (ЗИП) и инструменты. Пульт управления является основным прибором авторулевого. В нем размещены электромеханические элементы, силовые трансформаторы, усилители и другие устройства, предназначенные для выработки сигналов управления. На лицевых панелях ПУ расположены основные органы управления. Прибор ПУ устанавливается в ходовой рубке. Он обеспечивает работу авторулевого в од-ном их трех видов управления: автоматическом, следящем, простом.
Пульт следящего управления предназначен для управления кораблем толь-ко в двух режимах: следящем и простом. Прибор ПСУ устанавливается в ходовой рубке (при отсутствии в комплекте прибора ПУ) или на верхнем мостике. По своей конструкции ПСУ аналогичен прибору ПУ, но в нем отсутствуют те элементы, которые предназначены для автоматического вида управления.
Переключатель пультов обеспечивает переключение электрических цепей, если в комплектации авторулевого имеются два и более пульта управления (ПУ или ПСУ). Количество положений переключателя зависит от числа пультов.
Исполнительный механизм служит для управления электрогидравлической рулевой машиной (РМ). В зависимости от типа насоса РМ применяется ИМ-1 или ИМ-2. Прибор ИМ устанавливается в румпельном отделении, на корпусе насоса.
Рулевой датчик содержит электромеханические элементы для выработки сигнала обратной связи в схеме авторулевого. Прибор РД устанавливается в румпельном отделении и имеет непосредственную связь с балером руля. Помимо рассмотренных приборов, в комплект авторулевого «Аист» могут дополнительно входить: соединительный ящик (СЯ-42), предназначенный для разветвления электрических цепей, и стация электроэлементов (СЭ), которая содержит ряд устройств, обеспечивающих работу схемы.
Авторулевой «Аист» характеризуется следующими техническими данными: 1. При наличии в комплекте прибора ПУ возможны 4 вида управления: автоматический, следящий, простой и ручной. Автоматический вариант управления обеспечивается сигналом от гирокомпаса или дистанционного магнитного компаса. В этом случае корабль удерживается на заданном курсе без участия человека. В следящем режиме курсоуказатель отключается от схемы авторулевого и кораблем управляет человек с помощью штурвала. При переходе на простой (резервный) вид управления схема авторулевого не используется. Управление рулем производится с помощью двух клавишей, обеспечивающих включение исполнительного механизма рулевой машины. Ручной вид управления является аварийным. Он применяется в случае отказа сей схемы авторулевого. Управление рулем производится вручную по-средством рукоятки, находящейся непосредственно на ИМ. 2. Средняя величина рыскания в автоматическом режиме (при оптимальных положениях регуляторов) составляет примерно 10 при волнении моря до 3 баллов и не превышает 30 при волнении в 5 баллов. Когда волна выше 5 баллов, авторулевой обеспечивает надежное удержание корабля на курсе, но величина рыскания при этом будет более 30. 3. При любом виде управления максимальный угол перекладки руля не превышает 350. Это обеспечивается электрическими ограничителями. 4. Надежная работа электрической схемы авторулевого предусматривает, что-бы сопротивление изоляции было не менее 1 МОм.