

Обратная угловая засечка. Решение задачи Ганзена
К элементарным измерениям относится и измерение угла β на определяемой точке P между направлениями на два пункта A и B с известными координатами XA, YA и XB, YB (рис. 2.10). Однако, это измерение оказывается теоретически довольно сложным, поэтому рассмотрим его отдельно.
Проведем окружность через три точки A, B и P. Из школьного курса геометрии известно, что угол с вершиной на окружности измеряется половиной дуги, на которую он опирается. Центральный угол, опирающийся на ту же дугу, измеряется всей дугой, следовательно, он будет равен 2β (рис. 2.10).
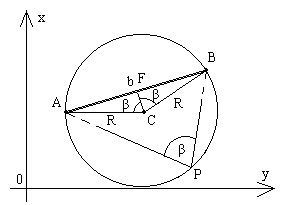
Рис. 2.10
Расстояние b между пунктами A и B считается известным, и из прямоугольного треугольника FCB можно найти радиус R окружности:
![]() (2.41)
(2.41)
Уравнение окружности имеет вид:
![]() (2.42)
(2.42)
где XC и YC - координаты центра окружности. Их можно вычислить, решив либо прямую угловую, либо линейную засечку с пунктов A и B на точку C. В уравнении (2.42) X и Y - координаты любой точки окружности, в том числе и точки P, но для нахождения двух координат точки P одного такого уравнения недостаточно.
Обратной угловой засечкой называют способ определения координат точки P по двум углам β1 и β2, измеренным на определяемой точке P между направлениями на три пункта с известными координатами A, B, C (рис. 2.11).
Аналитическое решение. Аналитическое решение обратной угловой засечки предусматривает ее разложение на более простые задачи, например, на 2 прямых угловых засечки и одну линейную, или на 3 линейных засечки и т.д. Известно более 10-ти способов аналитического решения, но мы рассмотрим только один - через последовательное решение трех линейных засечек.
Предположим, что положение точки P известно, и проведем две окружности: одну радиусом R1 через точки A, B и P и другую радиусом R2 через точки B, C и P (рис. 2.11). Радиусы этих окружностей получим по формуле (2.41):
![]() (2.43)
(2.43)
Если координаты центров окружностей - точек O1 и O2 будут известны, то координаты точки P можно определить по формулам линейной засечки: из точки O1 по расстоянию R1 и из точки O2 - по расстоянию R2.
Координаты центра O1 можно найти по формулам линейной засечки из точек A и B по расстояниям R1, причем из двух решений нужно взять то, которое соответствует величине угла β1: если β1<90o, то точка O1 находится справа от линии AB, если β1>90o, то точка O1 находится слева от линии AB.
Координаты центра O2 находятся по формулам линейной засечки из точек B и C по расстояниям R2, и одно решение из двух возможных выбирается по тому же правилу: если β2<90o, то точка O2 находится справа от линии BC, если β2>90o, то точка O2 находится слева от линии BC.
Задача не имеет решения, если все четыре точки A, B, C и P находятся на одной окружности, так как обе окружности сливаются в одну, и точек их пересечения не существует.
В задаче Ганзена находят координаты двух точек P и Q по известным координатам двух пунктов A и B и четырем углам, измеренным на определяемых точках (рис. 2.15), то есть, задача Ганзена является сдвоенной обратной угловой засечкой.
Исходные данные: XA, YA, XB, YB.
Измеренные элементы: β1, β2, β3, β4.
Неизвестные элементы: XP, YP, XQ, YQ.
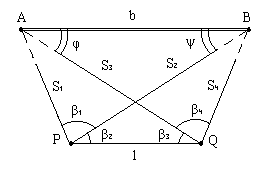

Рис. 2.15. Схема задачи Ганзена Рис. 2.16. Вариант задачи Ганзена
Графическое решение. Взять два листа прозрачной бумаги (кальки) и построить на них углы: на одном листе - углы β1 и β2, на другом листе - углы β3 и β4. Наложить на чертеж (план или карту) оба листа и, перемещая их произвольным образом, совместить направления углов на этих листах с точками А и В на чертеже. Переколоть точки P и Q на чертеж.
В однократной задаче Ганзена отсутствует контроль измерений, поэтому на практике четырьмя измерениями углов не ограничиваются, а выполняют какие-либо дополнительные измерения.