

Расчет плавания по ортодромии. Приближенные способы расчета.
Ортодромия (ДБК – дуга большого круга), является кратчайшим расстоянием между двумя точками на земной сфере. Ортодромия АВ обращена выпуклостью к ближайшему полюсу и пересекает меридианы под различными углами, она всегда короче локсодромии или равна ей. В высоких широтах и на больших переходах целесообразно выбирать маршрут по ортодромии. Разность между ортодромией и локсодромией можно получить по формулам:

Для нанесения на меркаторскую карту ДБК используют уравнение ортодромии:
 ,
где
,
где
– долота точки пересечения экватора ортодромией;
Ко – угол между меридианом и ортодромией в точке пересечения экватора;
i, i – текущие координаты.
Задаваясь долготой i, получают широту i точки на заданном меридиане. Значения Ко и о вычисляются предварительно:

Важным параметром ортодромии является направление ортодромии в начальной точке:
 .
.
Плавание экономически
выгоднее совершать не по касательным
к ортодромии Кн,
а по хордам. Угол между касательной и
хордой будет равен ортодромической
поправке .
Следовательно, общий принцип расчёта
плавания по ортодромии состоит в расчёте
начального курса Кн,
выборе
отрезка плавания S
для и получения истинного курса: ИК = Кн
+ .
и получения истинного курса: ИК = Кн
+ .
Р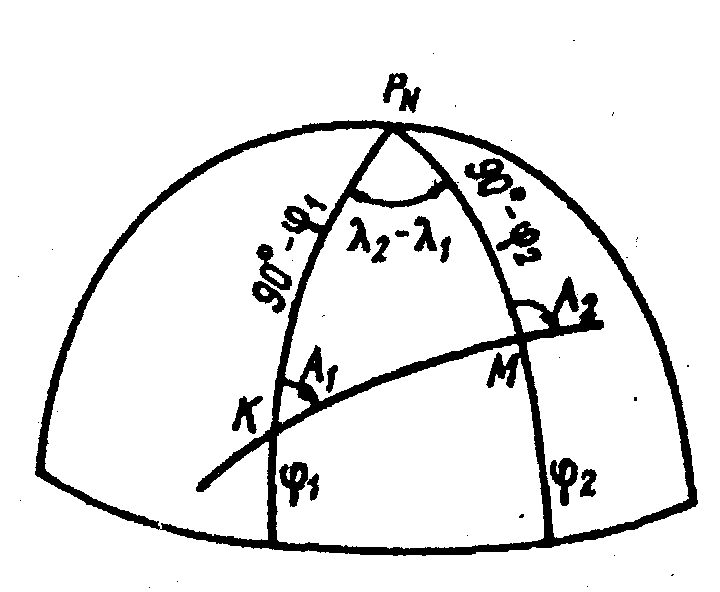 асчёт
начального курса может быть выполнен
с использованием таблицы ортодромических
поправок. Для этого на мелкомасштабной
карте соединяют точки А и В, снимают
значение локсодромического курса,
выбирают из таблицы 23-б МТ-75 угол общ
и вычисляют Кн
= ЛокК1
- общ.
Пользуясь таким приёмом, ортодромию
можно нанести на карту, повторяя
вычисления для двух, трёх и более точек.
Для сокращения расчётов изжаются карты
в гномонической проекции, на которых
ортодромия изображается прямой линией.
Соединяя начальную и конечную точки,
получают ортодромию, координаты которой
затем переносят на меркаторскую карту.
На гномонических картах имеются таблицы
и номограммы для расчёта длины ортодромии
и начального курса.
асчёт
начального курса может быть выполнен
с использованием таблицы ортодромических
поправок. Для этого на мелкомасштабной
карте соединяют точки А и В, снимают
значение локсодромического курса,
выбирают из таблицы 23-б МТ-75 угол общ
и вычисляют Кн
= ЛокК1
- общ.
Пользуясь таким приёмом, ортодромию
можно нанести на карту, повторяя
вычисления для двух, трёх и более точек.
Для сокращения расчётов изжаются карты
в гномонической проекции, на которых
ортодромия изображается прямой линией.
Соединяя начальную и конечную точки,
получают ортодромию, координаты которой
затем переносят на меркаторскую карту.
На гномонических картах имеются таблицы
и номограммы для расчёта длины ортодромии
и начального курса.
Вычисление длины дуги меридиана и параллели
Зная радиус Земли, можно рассчитать длину большого круга (меридиана и экватора):
= 2 х 3,1415926 х 6371км =40030км.
Для приближенных расчетов можно принять 40 000 км. Определив длину большого круга, можно рассчитать, чему равна длина дуги меридиана (экватора) в 1° или в 1’:
1° дуги = S/360°=40 030 км/360°=111,2 км;
1’ дуги = 111,2 км/60’ = 1,853 км.
Длина каждой параллели меньше длины экватора и зависит от широты места. Длина дуги параллели определяется по формуле:
lпар = lэкв;
где lэкв — длина дуги экватора с заданной разностью долгот;
— широта параллели.
При определении длины дуги параллели следует помнить, что при одной и той же разности долгот длина дуги параллели с приближением к полюсам уменьшается, так как функция косинуса с увеличением угла убывает.
Средства автоматизированной прокладки (сарп). Требования имо.
Современные САРП по конструкции разделяются на 2 основных типа:
системы с автономным индикатором, подключаемым к штатной судовой РЛС;
системы, являющиеся составной частью штатной судовой РЛС, с общим индикатором кругового обзора.
Общим для всех САРП является использование цифровой вычислительной техники для обработки поступающих радиолокационных данных и отображение результата обработки на индикаторе кругового обзора в форме векторов, символов, охранных зон, отметок прошлого движения целей и других обозначений.
Эксплуатационные требования.
Требования по точности определены для следующих параметров: относительный курс, относительная скорость цели, расстояние до точки кратчайшего сближения, время выхода в точку кратчайшего сближения, истинные курс и скорость цели.
Требования отнесены к четырем типовым сценариям, охватывающим различные ситуации встречи. При скоростях судна 10-25 уз, относительной скорости цели в пределах 10-20 уз, дистанции до цели от 1 до 8 миль вектор относительной скорости должен определяться с погрешностью по направлению, не превышающей 5 0 на величине 1 узел. Расстояние до точки кратчайшего сближения должно вычисляться с погрешность не более 0,7 милей, а время выхода в эту точку – с погрешностью до 1 минуты.
САРП , как любая система, является только средством судовождения и как всякое средство имеет свои ограничения ( включая ограничения датчиков информации ). Поэтому чрезмерное доверие к САРП без надлежащих знаний, заложенных в систему принципов и правил эксплуатации