

11. Стійкість екскаватора
Визначаємо в найбільш невигідних положеннях.
Стійкість екскаватора перевіряємо по трьом розрахунковим схемам.
Перше розрахункове положення.
Екскаватор
знаходиться на горизонтальній площадці,
платформа поперек ходової рами, стріла
на повному вильоті, виконується копання
на рівні стоянки циліндром повороту
рукояті. Плечі сил і кут
![]() вибираємо із розрахункової схеми.
вибираємо із розрахункової схеми.
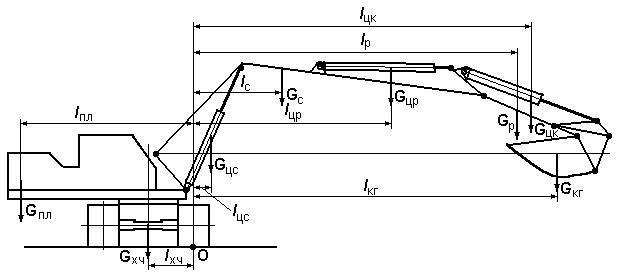
Малюнок 11.1 Схема до розрахунку першого невигідного положення.
![]() кН.
кН.
де
![]() - вага поворотної платформи з механізмами
- вага поворотної платформи з механізмами

Зусилля Р01 знаходимо з рівняння рівноваги моментів відносно шарніру В (кріплення рукояті до стріли) при копанні поворотом рукояті з найбільшим тиском в системі.
![]()
Звідси

Коефіцієнт стійкості
![]()
При такому
коефіцієнті стійкості і даному робочому
положенні не можливо реалізувати всі
зусилля на зубцях ковша, яке може бути
створено циліндром рукояті. Щоб
реалізувати всі зусилля на зубцях
необхідно збільшити плече
,
тобто радіус хвостової частини поворотної
платформи
![]() збільшити на 4500 мм, тоді
збільшити на 4500 мм, тоді
![]() кН.
кН.
![]()
У цьому випадку стійкість екскаватора буде забезпечена, але буде відбуватися зачіпання відвалу ґрунту хвостовою частиною поворотної платформи.
Також можна підвищити вагу поворотної платформи, але тоді вага екскаватора не буде відповідати вихідним даним.
Друге розрахункове положення відповідає повороту на вивантаження, платформа упоперек рами, ківш на вильоті найбільшого радіусу вивантаження підвернутий під рукоять.
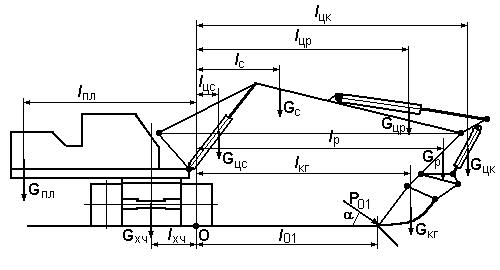
Малюнок 11.2 Схема до розрахунку другого невигідного положення.
Стійкість перевіряємо відносно точки О, яка відповідає середині ширини колеса
кН.

Коефіцієнт стійкості
![]()
Отриманий коефіцієнт не входить в проміжок 1,1…1,15, тому у цьому положенні буде відбуватися перекидання екскаватора і всі можливі операції буде неможливо виконати. Щоб цього не відбувалося і операції можливо було виконувати у повному обсязі треба змістити центр поворотної платформи і буде відбуватися зачіпання відвалу ґрунту хвостовою частиною поворотної платформи.
Тоді
![]() кН.
кН.
![]()
Третє
розрахункове положення відповідає
руху екскаватора під уклон (![]() =22),
стріла піднята до прибудови, рукоять
підвернута під стрілу, ківш порожній,
тиск Pв
= 250 Н/см2
вітру у бік ухилу
=22),
стріла піднята до прибудови, рукоять
підвернута під стрілу, ківш порожній,
тиск Pв
= 250 Н/см2
вітру у бік ухилу
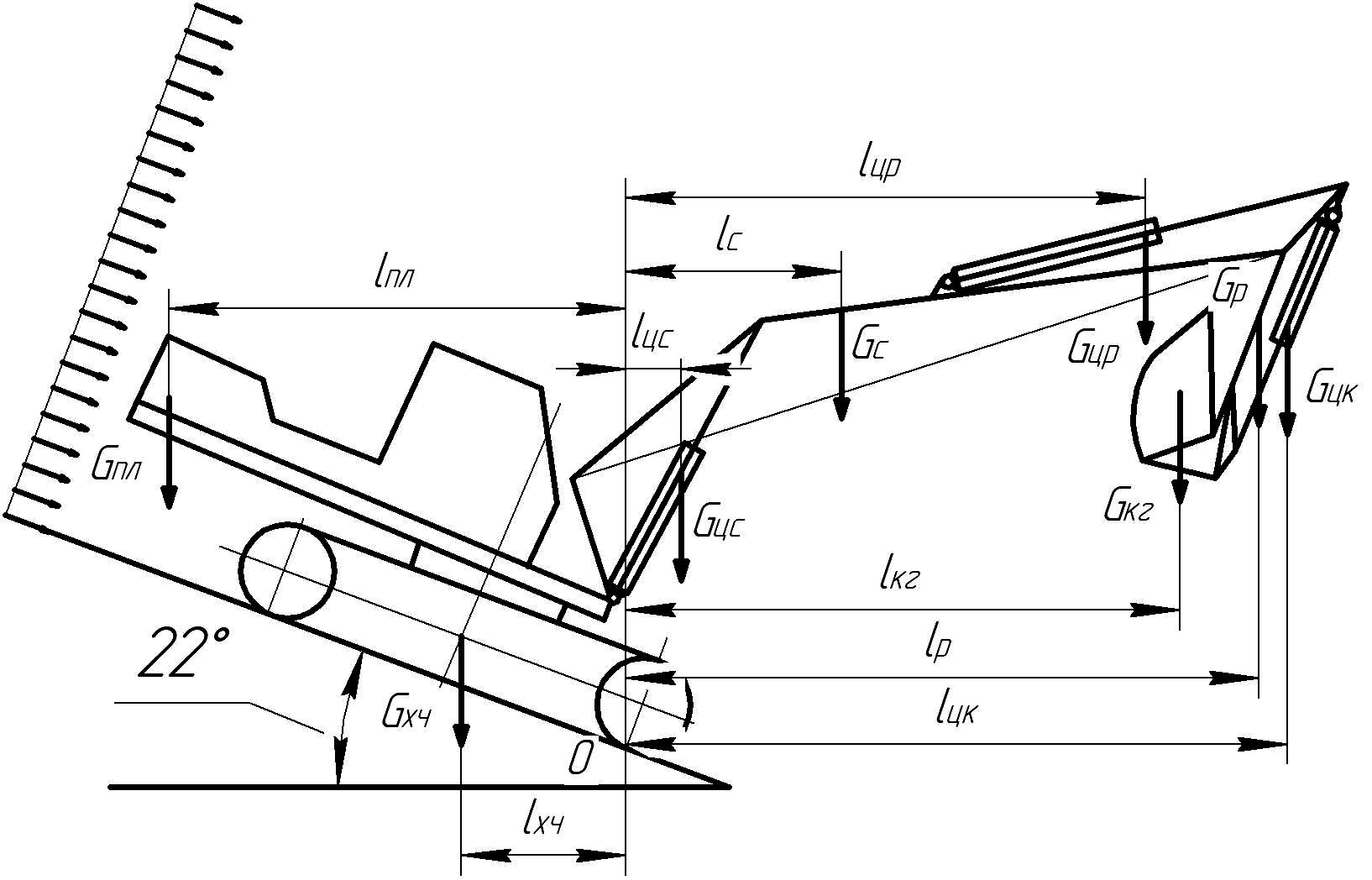
Малюнок 11.3 Схема до розрахунку третього невигідного положення.
Утримуючий момент
![]() кН.
кН.

де
![]() - момент від сил вітру,
- момент від сил вітру,

![]() - під
вітрова площа відносно кузова, кабіни
і виступаючої частини стріли, ходової
частини;
- під
вітрова площа відносно кузова, кабіни
і виступаючої частини стріли, ходової
частини;
![]() - висота
прикладення сили вітру, дорівнює 2/3
висоти кузова, кабіни, виступаючої
частини стріли і ходової частини.
- висота
прикладення сили вітру, дорівнює 2/3
висоти кузова, кабіни, виступаючої
частини стріли і ходової частини.
Коефіцієнт стійкості
![]()
![]() - що значно
більше мінімального коефіцієнту
стійкості рівного
- що значно
більше мінімального коефіцієнту
стійкості рівного
![]() ,
тому при русі екскаватора під уклін
стійкість екскаватора значною мірою
забезпечена.
,
тому при русі екскаватора під уклін
стійкість екскаватора значною мірою
забезпечена.
12. Визначення продуктивності і собівартості розробки 1 м3 ґрунту
При визначенні собівартості розробки 1 м3 ґрунту значення експлуатаційної продуктивності пов’язані із вартістю розхідних матеріалів і пов’язані з оплатою роботи:
![]() м3/год.
м3/год.
де
![]() - місткість ковша;
- місткість ковша;
![]() - коеф.
наповнення ковша;
- коеф.
наповнення ковша;
![]() - коеф.
розпушення ґрунту;
- коеф.
розпушення ґрунту;
![]() - коеф.
використання екскаватора;
- коеф.
використання екскаватора;
![]() - тривалість
робочого циклу.
- тривалість
робочого циклу.
![]() с.
с.
![]() - час
копання ґрунту:
- час
копання ґрунту:
![]() с.
с.
де
![]() - час штока стріли:
- час штока стріли:
![]() с.
с.
![]() - час штока
рукояті:
- час штока
рукояті:
![]() с.
с.
![]() - час штока
ковша:
- час штока
ковша:
![]() с.
с.
![]() - час
повороту:
- час
повороту:
![]() с.
с.
![]() - час
вивантаження:
- час
вивантаження:
![]() с.
с.
![]() - час
холостого ходу:
- час
холостого ходу:
![]() с.
с.
Собівартість 1 м3 ґрунту:
![]() ,
,
де
![]() - планово-розрахункова собівартість
1маш/год.
- планово-розрахункова собівартість
1маш/год.
![]() ;
;
![]() - розрахункова
вартість екскаватора;
- розрахункова
вартість екскаватора;
![]() -
амортизаційні відчислення;
-
амортизаційні відчислення;
![]() - кількість
днів роботи протягом року;
- кількість
днів роботи протягом року;
![]() - число
змін екскаватора (8,2);
- число
змін екскаватора (8,2);
![]() - вартість
одного монтажу-демонтажу;
- вартість
одного монтажу-демонтажу;
![]() - вартість
транспортування;
- вартість
транспортування;
![]() - час
роботи машини на об’єкті;
- час
роботи машини на об’єкті;
![]() - затрати
на обслуговування;
- затрати
на обслуговування;
![]() - затрати
на зміну і ремонт змінного оснащення;
- затрати
на зміну і ремонт змінного оснащення;
![]() - затрати
на енергоматеріали;
- затрати
на енергоматеріали;
![]() - вартість
мастильних матеріалів;
- вартість
мастильних матеріалів;
![]() - зарплата.
- зарплата.