

ВСТУП
Виконання планів будівництва включає в себе повну розробку об’ємів земляних робіт з яких велика частина проводиться одноківшевими екскаваторами.
Одноківшеві екскаватори з’явились майже півтора століття тому. В Росії вони вперше були застосовані при будівництві залізничної колії Санки-Петербург-Москва. Випуск екскаваторів було налагоджено в XX сторіччі на Лубинівському заводі. Інтенсивний розвиток відбувся лише після Великої Вітчизняної війни.
Одноківшевий екскаватор є землерийною машиною циклічної дії. Він призначений для розробки і переміщення ґрунту в транспортний засіб чи у відвал. Універсальні, крім того, можуть виконувати планування, навантажувальні, сваєбійні та інші роботи.
Вони розробляють також і сипучі грунти, здійснюють завантажування мерзлих порід та скальних.
Використання гідроприводу на сучасних екскаваторах забезпечує підвищення продуктивності за рахунок збільшення зусилля на зубцях ковша, а жорстка підвіска підвищує точність виконання операцій.
В даній роботі проводиться розрахунок лінійних розмірів та мас екскаватора, силовий та кінематичний розрахунок робочого обладнання, розрахунок на міцність робочого обладнання, розрахунок механізмів обертання платформи та привода гусеничного рушія, визначення стійкості екскаватора. За розрахунковими параметрами екскаватора робимо розрахунок продуктивності і собівартості розробки грунту.
ВИХІДНІ ДАНІ
Місткість
ковша -
![]() м3;
м3;
Маса
екскаватора -
![]() т;
т;
Максимальна
глибина копання -
![]() м;
м;
Максимальна
висота вивантаження -
![]() м;
м;
Довжина
стріли -
![]() м;
м;
Об’ємна
щільність ґрунту -
![]() кг/м3;
кг/м3;
Повний
кут повороту стріли
-
![]() ;
;
Повний
кут повороту рукояті
-
![]() ;
;
Повний
кут повороту ковша -
![]() ;
;
Робоче обладнання – зворотна лопата;
Номінальний
тиск в гідросистемі -
![]() МПа;
МПа;
Питомий опір ґрунту копанню:
Поворотом
рукояті -
![]() Н/м2;
Н/м2;
Поворотом
ковша -
![]() Н/м2;
Н/м2;
Коефіцієнт
наповнення -
![]() ;
;
Коефіцієнт
розпушення -
![]() ;
;
Коефіцієнт
завантаженості двигуна: -
![]() ;
;
ККД
робочого обладнання: -
![]() ;
;
ККД
приводу: -
![]() ;
;
Висота
поворотної платформи -
![]() м;
м;
Кількість
гідроциліндрів стріли -
![]() ;
;
Коефіцієнт
розмірної групи ковша -
![]() .
.
1. ВИЗНАЧЕННЯ ЛІНІЙНИХ РОЗМІРІВ ТА МАС ВУЗЛІВ
ЕКСКАВАТОРА
На основі вихідних даних визначаємо параметри екскаватора використовуючи встановлені на основі аналітичних і експериментальних залежності.
Габарити екскаватора та робочого обладнання.
Подовжня база:
![]() м
м
Приймемо:
![]() м
м
Висота ходу:
![]() м
м
Приймемо:
![]() м
м
Ширина колеса:
![]() м
м
Приймемо:
![]() м
м
Ширина ходу:
![]() м
м
Приймемо:
![]() м
м
Зазор між
ходовою частиною і поворотною платформою
-
![]() м
м
Кут
звичайного відкосу ґрунту
![]()
Радіус хвостової частини поворотної платформи:
![]() м
м
Діаметр опорно-поворотного кругу:
![]() м
м
Приймемо:![]() м
м
Радіус ковша (відстань від точки кріплення ковша до рукояті до ріжучої кромки):
![]() м
м
Приймемо:
![]() м
м
Ширина ковша:
![]() м
м
Приймемо:
![]() м
м
Довжина рукояті:
![]() м
м
Приймемо:
![]() м
м
Маси вузлів екскаватора
Приймемо масу вузлів за аналогом – ЕО-3322 (q=0,4 м3)
![]()
Найменування вузла |
Маса вузла, кг |
||
ЕО-3322 |
Розрахункова |
Приймемо |
|
|
950 200 1200 200 300 320 60 100 420 200 800 |
475 100 600 100 150 160 30 50 210 100 400 |
900 150 1150 150 250 270 60 100 300 150 750 |
Усього поворотна платформа з механізмами |
4750 |
2375 |
4230 |
|
5440 1625 462 520 |
2720 813 231 260 |
5200 1588 462 520 |
Усього робоче обладнання |
8047 |
4024 |
7770 |
Усього екскаватора |
12797 |
6400 |
12000 |
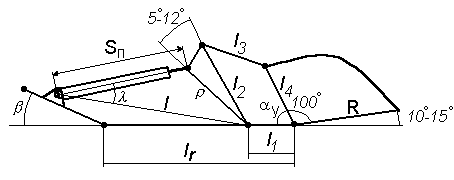
2. Розрахунок стрілопідйомного механізму
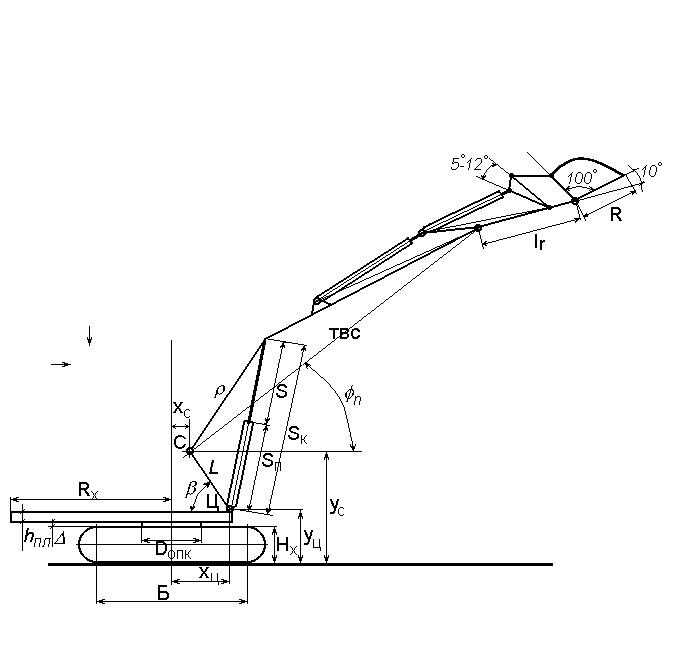
Малюнок 2.1. Схема до розрахунку стрілопідйомного механізму
Параметри стрілопідйомного механізму.
Координати точки “Ц”:
![]() м
м
Приймемо:
![]() м
м
![]() м
м
Приймемо:
![]() м
м
Визначимо положення точки “С”:
![]() м
м
1) Знайдемо орієнтовну довжину нерухомої ланки, м:
 м
м
2)
![]() - кут нахилу нерухомої ланки,
- кут нахилу нерухомої ланки,
- кут повороту стріли,
Додатково
знайдемо допоміжний кут
![]()
3) Визначимо розрахунковий хід гідроциліндра повороту стріли, м:
![]() м
м
4) Знайдемо радіус rk, який проведений з точки “С” є дотичним до ГЦ, м:
![]() м
м
Орієнтуючись на момент Мс визначимо діаметр ГЦ, мм:

![]() кг
кг
![]() кг
кг
![]()
Кількість гідроциліндрів стріли:
З довідника виберемо ГЦ (по діаметру та робочому ходу):
![]()
Кути тиску штоку ГЦ на коромисло (в початковому та кінцевому положеннях):
![]()
На основі ходу штоку прийнятого ГЦ уточнюємо довжину коромисла , довжину нерухомої ланки l, повний та кінцевий кут повороту стріли та к, кут встановлення нерухомої ланки l:
 мм
мм
Приймаємо:
![]() мм.
мм.

Приймаємо:
![]()

Приймаємо:
![]()
Приймаємо:
![]() мм.
мм.
З метою перевірки підрахуємо Хс
![]()
![]()
![]()
Уточнюємо теоретичну довжину стріли, м:
 м
м
Приймемо:
![]() м.
м.
Визначаємо радіус копання на рівні осі п’яти стріли, м:
Кут відхилення осі рукояті від теоретичної осі стріли:
![]()
Приймаємо:
![]()
Визначаємо кут відхилення радіуса коромисла від ТВС:
![]()
3. Розрахунок механізму повороту рукояті
![]()
Приймаємо:
![]()
Визначаємо орієнтовно радіус коромисла:
![]() ;
;
![]() м.
м.
Розрахунковий хід поршня:
![]() м.
м.
Приймаємо:
![]() мм.
мм.
Визначаємо відстань від осі повороту рукояті (точка „О”) до осі ГЦ при копанні на рівні горизонталі, проведеної через точку „О”,:
![]() м.
м.
Приймаємо:
![]() м.
м.
Визначаємо мінімальну довжину шляху заповнення ковша ґрунтом за умови прийнятої ширини ковша b, довжини рукояті lr і радіуса ковша R:
![]() мм.
мм.
Приймемо:
![]() мм.
мм.
Визначимо товщину стружки, що потрапляє в ківш, м:
Приймемо:
![]() м.
м.
![]() м.
м.
Приймаємо:
![]() м.
м.
Визначаємо силу опору копанню поворотом рукояті:
![]() кН;
кН;
![]() кН.
кН.
Для виконання побудови по основних показниках визначимо основні параметри гідроциліндра. Для цього визначимо момент від сил тяжіння робочого обладнання та сили опору копанню відносно точки „О”, Н·м.

Приймаємо:
![]()
Орієнтуючись на момент Мо визначимо діаметр ГЦ:
 мм.
мм.
Розрахунковий хід штоку ГЦ повороту рукояті, м:
![]() мм.
мм.
На основі розрахункових даних приймемо стандартний ГЦ:
З довідника виберемо ГЦ (по діаметру та робочому ходу):
![]()
Кут тиску
штоку ГЦ на коромисло
![]() в початковому положенні:
в початковому положенні:
![]()
Підрахуємо уточнені параметри гідромеханізму:
![]() мм.
мм.
Підрахуємо радіуси з точки „О” до осі ГЦ в початковому та кінцевому положеннях, м:
![]() мм.
мм.
 мм.
мм.
Вони співпадають. Перевірка зійшлась.
4. Розрахунок механізму повороту ковша.
Малюнок 4.1. Схема до розрахунку механізму повороту ковша
Кут відхилення коромисла рукояті від стріли:
Механізм керування ковша включає в себе два багатоланника. Для компактизації механізму подвійний важіль застосовують, коли потрібно отримати великий кут повороту ковша.
Для визначення параметрів механізму приймемо деякі розміри:
![]() м;
м;
![]() м;
м;
![]() м.
м.
Приймаємо:
![]() мм.
мм.
![]() мм.
мм.
![]() мм.
мм.
Приймаємо:
![]() мм.
мм.
Визначаємо мінімальну довжину шляху заповнення ковша ґрунтом за умови прийнятої ширини ковша b і радіуса ковша R:
![]() м.
м.
Приймемо:
![]() мм.
мм.
Визначимо товщину стружки, що потрапляє в ківш, м:
Приймемо: м.
![]() м.
м.
Приймаємо:
![]() м.
м.
Визначаємо силу опору копанню поворотом рукояті:
![]() кН;
кН;
![]() кН.
кН.
Використовуючи побудови знаходимо хід поршня:
![]() мм.
мм.
![]() - вимірюємо
з креслення. (
- вимірюємо
з креслення. (![]() ).
).
Об’єм циліндру повороту ковша при копанні в несприятливому положенні:

Розрахунковий діаметр ГЦ повороту ковша:
 м
= 117мм.
м
= 117мм.
За довідником приймаємо стандартний ГЦ:
![]()
Визначаємо відносну характеристику ГЦ:
![]()
За рекомендаціями приймаємо кут тиску в кінці копання:
![]()
Параметр:
![]()
Тоді кут тиску в початковому положенні:
Довжина радіуса коромисла:

Приймаємо:
![]() мм.
мм.
Початковий кут
повороту важеля:
![]()

Довжина нерухомої ланки:

Для перевірки розрахунків знаходимо найменшу довжину ГЦ по розрахунковим значенням:

Розрахункове значення ходу штоку та табличне співпадають с досить великою точністю. Тому будемо вважати, що параметри механізму прийняті правильно.