

6 Синтез дискретной спр с регулятором скорости, обеспечивающим конечную длительность переходного процесса
Структурная схема дискретной системы управления представлена на рисунке 6.1.


Рисунок 6.1 – Упрощенная структурная схема системы подчиненного управления электроприводом с цифровым регулятором скорости
Определяем приведенную передаточную функцию непрерывной части с учетом экстраполятора:
 (6.1)
(6.1)
Выполняем факторизацию полиномов:
Q*(z)= Q-*(z)Q+*(z); (6.2)
Q-*(z)=(z – 1); nq-=1; (6.3)
Q+*(z)=(z – 0,1852); nq+=1; (6.4)
Определяем порядок желаемого полинома: Gж(z)=z2.
Определяем полиномы регулятора:
P*(z)M1*(z)+ Q-*(z)N*(z)=z2. (6.5)
Порядок полинома M1*(z) nM1=nq- – 1 =0 и в общем виде полином имеет вид: M1*(z)=a0.
Порядок полинома знамена теля совпадает с полиномом для регулятора: nN = nP = 1; N*(z)=b0+b1z.
Подставим P*(z), M1*(z), Q-*(z), N*(z) в уравнение синтеза:
0,4536(z+0,5767)a0+(z – 1)(b0+b1z)= z2. (6.6)
Группируем:
b1z2+b0z – b1z +0,4536a0z – b0 + 0,2616a0=z2. (6.7)
Приравняв коэффициенты в левой и правой части уравнения при одинаковых степенях z, получаем:
![]()
Искомые полиномы регулятора:
M1*(z)=a0=1,398.
N*(z)=b0+b1z= z + 0,366.
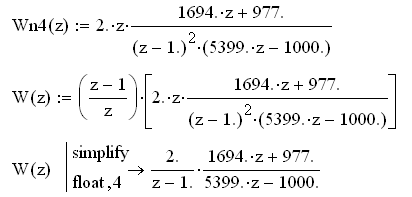
Определяем передаточную функцию регулятора:
![]() (6.8)
(6.8)
7 АНАЛИЗ ДИСКРЕТНОЙ СПР С ПЕРЕХОДНЫМ ПРОЦЕССОМ КОНЕЧНОЙ ДЛИННЫ Переходной процесс может быть получен по следующей передаточной функции:
![]() (6.9)
(6.9)
Реакция на ступенчатое воздействие:
![]() (6.10)
(6.10)
Строим переходной процесс h*(z) при реакции системы на единичное ступенчатое воздействие:
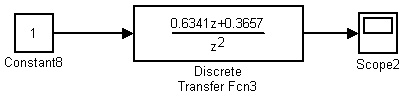
Рисунок 6.2 – Структурная схема исследуемой системы в среде MATLAB Simulink
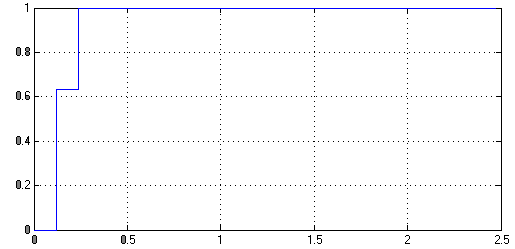
Рисунок 6.3 – Переходной процесс при реакции системы на единичное ступенчатое воздействие в среде MATLAB Simulink
8 Программная реализация регулятора, обеспечивающего конечную длительность переходного процесса дискретной спр
8.1 Листинг программы
Передаточную функцию регулятора представим в виде разностного уравнения:
![]()

Программа на языке Delphi:
unit Unit1;
interface
uses
Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms, Dialogs, StdCtrls, Buttons, TeEngine, Series, ExtCtrls, TeeProcs, Chart;
type
TForm1 = class(TForm)
Chart1: TChart;
BitBtn1: TBitBtn;
Series1: TLineSeries;
Edit1: TEdit;
Label1: TLabel;
Edit2: TEdit;
Label2: TLabel;
Edit3: TEdit;
Label3: TLabel;
Edit4: TEdit;
Label5: TLabel;
Edit7: TEdit;
Edit6: TEdit;
Label6: TLabel;
Edit8: TEdit;
Label7: TLabel;
Label8: TLabel;
Label4: TLabel;
Edit9: TEdit;
Label9: TLabel;
Label11: TLabel;
procedure BitBtn1Click(Sender: TObject);
procedure Edit1Exit(Sender: TObject);
procedure Edit6Exit(Sender: TObject);
procedure Edit2Exit(Sender: TObject);
procedure Edit7Exit(Sender: TObject);
procedure Edit3Exit(Sender: TObject);
procedure Edit8Exit(Sender: TObject);
procedure Edit4Exit(Sender: TObject);
procedure Edit9Exit(Sender: TObject);
private
{ Private declarations }
public
{ Public declarations }
end;
{Задаем массив}
type a=array[1..1000] of real;
var
Form1: TForm1;
implementation
{$R *.dfm}
procedure TForm1.BitBtn1Click(Sender: TObject);
var T,xinp,xout:real; n,i:integer;
x_inp,x_out:array[0..10000] of real;
ni_,no_:array[0..3] of real;
begin
ni_[0]:=StrToFloat(Edit1.Text);
ni_[1]:=StrToFloat(Edit2.Text);
ni_[2]:=StrToFloat(Edit3.Text);
ni_[3]:=StrToFloat(Edit4.Text);
no_[0]:=0;
no_[1]:=StrToFloat(Edit6.Text);
no_[2]:=StrToFloat(Edit7.Text);
no_[3]:=StrToFloat(Edit8.Text);
n:=StrToInt(Edit9.Text);
for i:=0 to n do
begin
x_inp[i]:=1;
xinp:=ni_[0]*x_inp[i]+ni_[1]*x_inp[i-1]+ni_[2]*x_inp[i-2]+
ni_[3]*x_inp[i-3];
xout:=no_[1]*x_out[i-1]+no_[2]*x_out[i-2]+no_[3]*x_out[i-3];
x_out[i]:=xinp+xout;
end;
Chart1.SeriesList.Series[0].Clear;
for i:=1 to n do
begin
Chart1.SeriesList.Series[0].AddXY(i-1,x_out[i]);
Chart1.SeriesList.Series[0].AddXY(i,x_out[i]);
end;
end;
procedure TForm1.Edit1Exit(Sender: TObject);
begin
if Edit1.Text<>'' then
try
StrToFloat(Edit1.Text);
except
on EConvertError do
begin
Edit1.SetFocus;
end;
end;
end;
procedure TForm1.Edit6Exit(Sender: TObject);
begin
if Edit6.Text<>'' then
try
StrToFloat(Edit6.Text);
except
on EConvertError do
begin
Edit6.SetFocus;
end;
end;
end;
procedure TForm1.Edit2Exit(Sender: TObject);
begin
if Edit2.Text<>'' then
try
StrToFloat(Edit2.Text);
except
on EConvertError do
begin
Edit2.SetFocus;
end;
end;
end;
procedure TForm1.Edit7Exit(Sender: TObject);
begin
if Edit7.Text<>'' then
try
StrToFloat(Edit7.Text);
except
on EConvertError do
begin
Edit7.SetFocus;
end;
end;
end;
procedure TForm1.Edit3Exit(Sender: TObject);
begin
if Edit3.Text<>'' then
try
StrToFloat(Edit3.Text);
except
on EConvertError do
begin
Edit3.SetFocus;
end;
end;
end;
procedure TForm1.Edit8Exit(Sender: TObject);
begin
if Edit8.Text<>'' then
try
StrToFloat(Edit8.Text);
except
on EConvertError do
begin
Edit8.SetFocus;
end;
end;
end;
procedure TForm1.Edit4Exit(Sender: TObject);
begin
if Edit4.Text<'' then
try
StrToFloat(Edit4.Text);
except
on EConvertError do
begin
Edit4.SetFocus;
end;
end;
end;
procedure TForm1.Edit9Exit(Sender: TObject);
begin
if Edit9.Text<>'' then
try
StrToFloat(Edit9.Text);
except
on EConvertError do
begin
Edit9.SetFocus;
end;
end;
end;
end.

Рисунок 8.1 – Оболочка приложения