

4 Определение периода квантования дискретной системы по критерию джури
Критерий Джури основывается на частотной характеристике непрерывной части системы, в качестве тестового сигнала для определения наибольшего допустимого периода квантования выбирается синусоидальное единичное воздействие.
![]() . (4.1)
. (4.1)
Произведем расчет в пакете Mathcad:
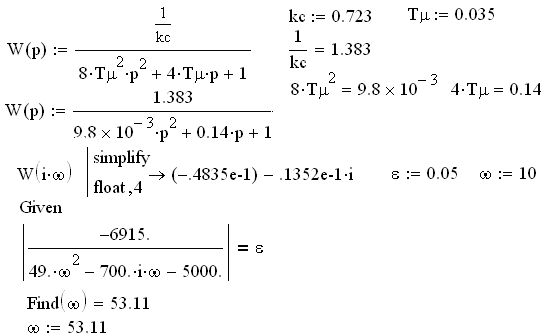
Рисунок 4.1 – Определение периода квантования дискретной системы по критерию Джури в пакете Mathcad
О
20
Период квантования находим по формуле:
![]() , (4.2)
, (4.2) ![]() с.
с.
5 Анализ дискретной системы с аналоговым регулятором момента и цифровым регулятором скорости
5.1 Определение передаточной функции дискретной СПР
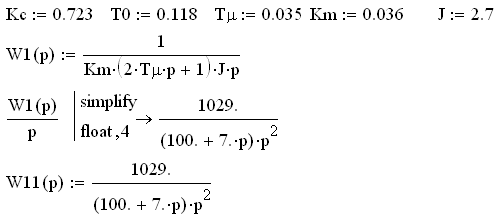
Произведем z-преобразования передаточных функций элементов системы:
Экстраполятор:
![]() . (5.1)
. (5.1)
Непрерывная часть:
![]() ,где (5.2)
,где (5.2)
![]() .
.
Произведём обратное преобразование Лапласа:

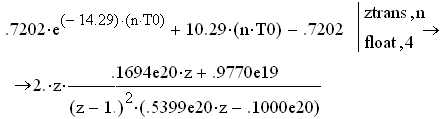
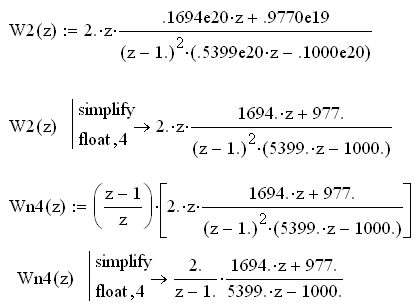
Определим передаточную функцию замкнутой системы в z-форме:
 ,
,
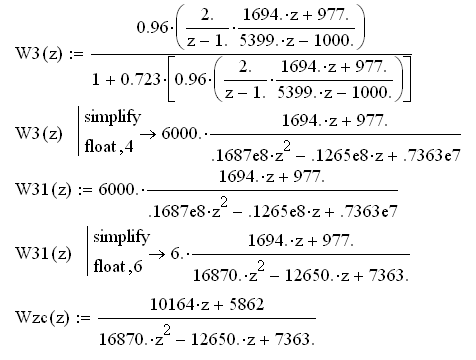
Передаточная функция замкнутой системы в z-форме:
![]() .
.
5.2 Проверка устойчивости дискретной СПР по корням характеристического уравнения в плоскостях “z” и “w”
Проверим устойчивость дискретной СПР в среде Mathcad:
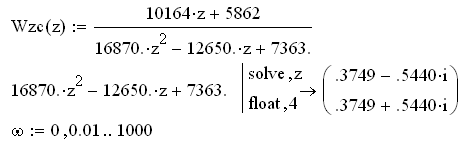
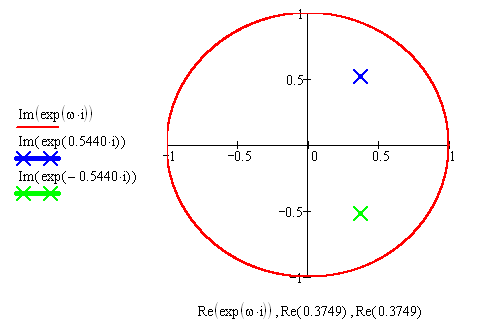
Рисунок 5.1 – Область устойчивости системы в плоскости «z»
Так как корни дискретной системы входят в область устойчивости в плоскости «z» (попадают в окружность единичного радиуса), то система устойчива.
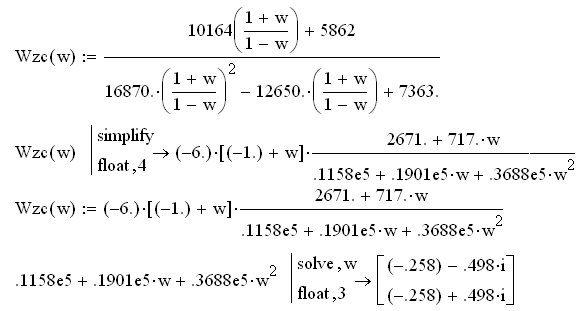
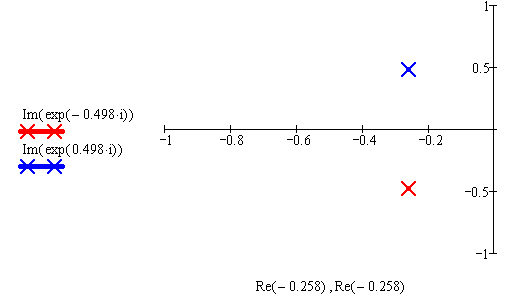
Рисунок 5.2 – Область устойчивости системы в плоскости «w»
Т.к. корни дискретной системы входят в область устойчивости в плоскости «w» (находятся в левой полуплоскости), то система устойчива.
5.3 Нахождение уравнения переходного процесса и показателей качества при реакции дискретной СПР на единичное ступенчатое воздействие
Если r(t) – единичное ступенчатое воздействие, то Z-преобразование для него:
![]() (5.3)
(5.3)
Выходная координата:
![]() (5.4)
(5.4)
 (5.5)
(5.5)
Разделяем переменные:
![]() (5.6)
(5.6)
Получаем разностное уравнение:
![]() (5.7)
(5.7)
Перейдем от абсолютного времени к относительному:
![]() (5.8)
(5.8)
Р
26
Таблица 5.1 – Расчет параметров разностного уравнения
k |
1.7498* *С[k-1] |
*С[k-2] |
0.43645* *С[k-3] |
0.60248* *R[k-1] |
0.34748* *R[k-2] |
С[k] |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0,60248 |
0 |
0,60248 |
2 |
1,05421 |
0 |
0 |
0 |
0,34748 |
1,40169 |
3 |
2,45269 |
-0,714722 |
0 |
0 |
0 |
1,73797 |
4 |
3,04110 |
-1,662836 |
0,262952 |
0 |
0 |
1,64121 |
5 |
2,87180 |
-2,061755 |
0,611771 |
0 |
0 |
1,42182 |
6 |
2,48790 |
-1,946978 |
0,758537 |
0 |
0 |
1,29946 |
7 |
2,27379 |
-1,686706 |
0,716310 |
0 |
0 |
1,30340 |
8 |
2,28069 |
-1,541552 |
0,620553 |
0 |
0 |
1,35969 |
9 |
2,37919 |
-1,546226 |
0,567150 |
0 |
0 |
1,40011 |
10 |
2,44992 |
-1,613007 |
0,568870 |
0 |
0 |
1,40579 |
11 |
2,45985 |
-1,660961 |
0,593439 |
0 |
0 |
1,39233 |
12 |
2,43630 |
-1,667690 |
0,611082 |
0 |
0 |
1,37969 |
13 |
2,41418 |
-1,651723 |
0,613557 |
0 |
0 |
1,37602 |
14 |
2,40776 |
-1,636731 |
0,607683 |
0 |
0 |
1,37871 |
15 |
2,41247 |
-1,632376 |
0,602167 |
0 |
0 |
1,38227 |
16 |
2,41869 |
-1,635572 |
0,600565 |
0 |
0 |
1,38369 |
17 |
2,42118 |
-1,639787 |
0,601741 |
0 |
0 |
1,38313 |
18 |
2,42020 |
-1,641472 |
0,603292 |
0 |
0 |
1,38202 |
19 |
2,41827 |
-1,640812 |
0,603911 |
0 |
0 |
1,38137 |
20 |
2,41712 |
-1,639501 |
0,603669 |
0 |
0 |
1,38129 |
21 |
2,41699 |
-1,638723 |
0,603186 |
0 |
0 |
1,38145 |
22 |
2,41726 |
-1,638631 |
0,602900 |
0 |
0 |
1,38153 |
23 |
2,41741 |
-1,638819 |
0,602866 |
0 |
0 |
1,38146 |
24 |
2,41728 |
-1,638918 |
0,602935 |
0 |
0 |
1,38130 |
25 |
2,41699 |
-1,638829 |
0,602972 |
0 |
0 |
1,38114 |
26 |
2,41672 |
-1,638636 |
0,602939 |
0 |
0 |
1,38102 |
27 |
2,41651 |
-1,638449 |
0,602868 |
0 |
0 |
1,38093 |
28 |
2,41636 |
-1,638311 |
0,602799 |
0 |
0 |
1,38085 |
29 |
2,41621 |
-1,638207 |
0,602748 |
0 |
0 |
1,38076 |
30 |
2,41605 |
-1,638108 |
0,602710 |
0 |
0 |
1,38065 |
 -1.1863*
-1.1863*
График переходного процесса полученный с помощью пакета прикладных программ , приведен на рисунке 5.3.
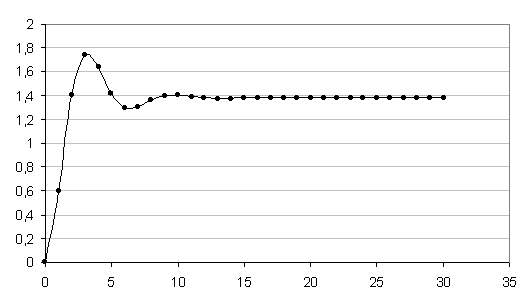
Рисунок 5.3 – График переходного процесса в дискретной САУ
Схема структурной модели цифровой САУ в пакете прикладных программ MATLAB Simulink приведена на рисунке 5.4.
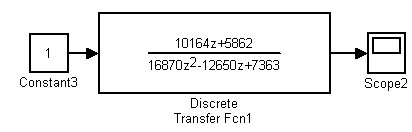
Рисунок 5.4 – Схемы структурной модели цифровой САУ
в пакете прикладных программ MATLAB Simulink
График переходного процесса в цифровой САУ, полученный с помощью пакета прикладных программ MATLAB Simulink, приведен на рисунке 5.5.
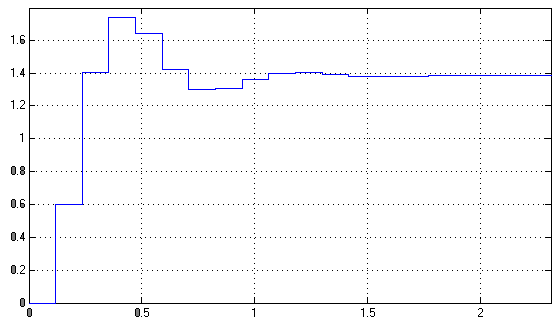
Рисунок 5.5 – График переходного процесса в цифровой САУ, полученный с помощью пакета прикладных программ MATLAB Simulink
Определим показатели качества из графика переходного процесса:
перерегулирование:
![]() ;
;
колебательность переходного процесса: ,6;
длительность переходного процесса:
 с.
с.