

1 Синтез регуляторов скорости и момента при настройке контуров спр на модульный оптимум
Дана структурная схема системы подчиненного регулирования скорости ТПН-АД, состоящая из регулятора скорости, регулятора момента, тиристорного преобразователя напряжения, асинхронного двигателя и датчиков (рис.1.1).
Рисунок 1.1 – Система подчиненного регулирования скорости ТПН-АД
На рисунке 1.1 приняты следующие обозначения:
κρκм – коэффициент усиления тиристорного преобразователя напряжения;
Тμ – постоянная времени тиристорного преобразователя;
J – момент инерции двигателя;
κм – коэффициент передачи датчика момента;
κс – коэффициент передачи датчика скорости.
Произведем синтез регуляторов скорости и момента при настройке контуров СПР на модульный оптимум.
Передаточная функция объекта контура момента в разомкнутом состоянии:
![]() . (1.1)
. (1.1)
Регулятор компенсирует ту часть объекта, которая не содержит Тμ:
![]() . (1.2)
. (1.2)
Передаточная функция регулятора контура момента:
![]() , (1.3)
, (1.3)
![]() .
.
Передаточная функция замкнутого контура момента:
 (1.4)
(1.4) ![]() .
.
Передаточная функция объекта контура скорости:
![]() . (1.5)
. (1.5)
Регулятор компенсирует малую постоянную времени:
![]() . (1.6)
. (1.6)
Передаточная функция замкнутого контура скорости:
![]() (1.7)
(1.7)
Передаточная функция регулятора скорости:
![]() , (1.8)
, (1.8)
![]() .
.
2 Анализ непрерывной модели спр, настроенной на модульный оптимум
2.1 Определение передаточной функции СПР
Определим передаточную функцию контура момента:
 (2.1)
(2.1)
Определим передаточную функцию замкнутой СПР:
 . (2.2)
. (2.2)
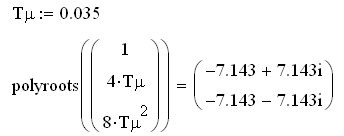
Характеристическое уравнение системы имеет вид:
![]() . (2.3)
. (2.3)
2.2 Проверка устойчивости СПР по корням характеристического уравнения в плоскости “р”
Произведем расчет корней характеристического уравнения (2.3) для настройки САУ на модульный оптимум в пакете прикладных программ Mathcad:
Р
16
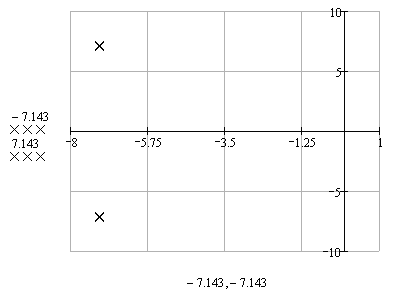
Рисунок 2.2 – Расположение корней характеристического уравнения
2.3 Нахождение уравнения переходного процесса и показателей качества при реакции СПР на единичное ступенчатое воздействие
Выполним построение переходного процесса с помощью пакета прикладных программ Mathcad:

![]()
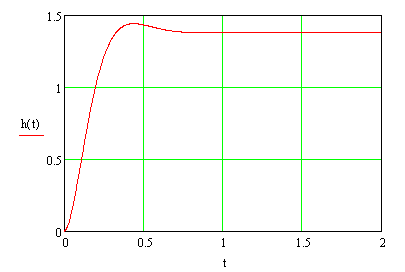
Рисунок 2.3 – Расчет и построение переходного процесса в среде пакета Mathcad при настройке САУ на модульный оптимум
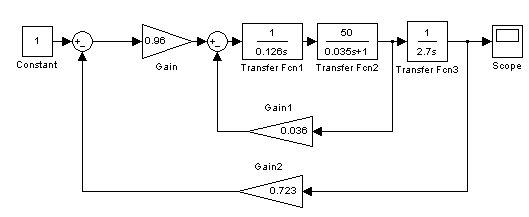
Рисунок 2.4 – Математическая модель аналоговой СПР в MatLab Simulink
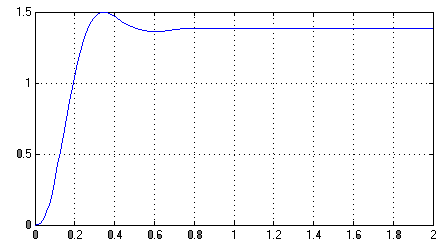
Рисунок 2.5 – График переходного процесса СПР при реакции на единичное ступенчатое воздействие в MatLab Simulink
Определим показатели качества из графика переходного процесса:
перерегулирование:
![]() ;
;
колебательность переходного процесса:
 ;
;длительность переходного процесса:
 175
с.
175
с.
3 Разработка структурной схемы дискретной спр
Для построения цифровой системы управления (ЦСУ) нам необходим вычислительный блок (регулятор скорости), квантователь (АЦП) и преобразователь кода в аналоговый сигнал (ЦАП). В состав аналоговой части входит объект управления.

Рисунок 3.1 – Упрощенная структурная схема системы подчиненного управления электроприводом с цифровым регулятором скорости
Передаточные функции элементов системы имеют следующий вид:
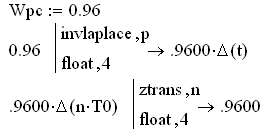
1. Передаточная функция дискретного регулятора скорости:
![]() (3.1)
(3.1)
![]()
2. В качестве цифро-аналогового преобразователя будем использовать экстраполятор нулевого порядка с коэффициентом усиления, равным единице. Передаточная функция экстраполятор нулевого порядка в Z-форме:
![]() . (3.2)
. (3.2)
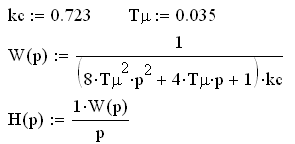
3. Передаточная функция непрерывной части:
![]() (3.3)
(3.3)
4. Коэффициент обратной связи по скорости:
Кс=0,723. (3.4)