

Кодирование входных и выходных символов состояний
Кодирование входных символов представлено в таблице 3 .
Опишем данный граф матрицей смежности:
Таблица 4. Матрица смежности
|
G1 |
G2 |
G3 |
G4 |
G5 |
G1 |
0 |
0 |
X3Y2 |
0 |
0 |
G2 |
X1Y1 |
0 |
0 |
0 |
0 |
G3 |
0 |
0 |
0 |
X4Y3 |
X5Y6 |
G4 |
0 |
X2Y7 |
0 |
0 |
X5Y4 |
G5 |
0 |
X2Y5 |
0 |
0 |
0 |

Таблица 5. Кодирование входного сигнала
X |
X1 |
X2 |
X3 |
X4 |
X5 |
X1 |
1 |
0 |
0 |
0 |
0 |
X2 |
0 |
1 |
0 |
0 |
0 |
X3 |
0 |
0 |
1 |
0 |
0 |
X4 |
0 |
0 |
0 |
1 |
0 |
X5 |
0 |
0 |
0 |
0 |
1 |
Таблица 6. Кодирование выходного сигнала
Y |
X1 |
X2 |
X3 |
X4 |
X5 |
Y1 |
1 |
0 |
0 |
0 |
0 |
Y2 |
0 |
0 |
1 |
0 |
0 |
Y3 |
0 |
0 |
0 |
1 |
0 |
Y4 |
0 |
0 |
0 |
0 |
1 |
Y5 |
0 |
1 |
0 |
0 |
0 |
Y6 |
0 |
0 |
0 |
0 |
1 |
Y7 |
0 |
1 |
0 |
0 |
0 |
Краткая сднф
Запишем
краткую совершенно дизъюнктивную
нормальную форму, исходя из того, что
выходу соответствует один вход и
принимающий 1, а остальные 0, обозначенные
логическим отрицанием НЕ
в
виде подчеркивания.







Кодирование состояний автомата представлено в таблице:
Таблица 7
|
X1 |
X2 |
X3 |
X4 |
X5 |
X1 |
1 |
0 |
0 |
0 |
0 |
X2 |
0 |
1 |
0 |
0 |
0 |
X3 |
0 |
0 |
1 |
0 |
0 |
X4 |
0 |
0 |
0 |
1 |
0 |
X5 |
0 |
0 |
0 |
0 |
1 |
Из данной таблицы можно сделать вывод: положение манипулятора, в какой либо момент времени, только одно.
Таким образом, были определены все логические функции автомата. Зная их можно построить комбинационную схему автомата с памятью . [3,5]
Обобщенная функциональная схема структурного автомата
Теперь можно составить обобщенную функциональную схему структурного автомата (Рис.13).
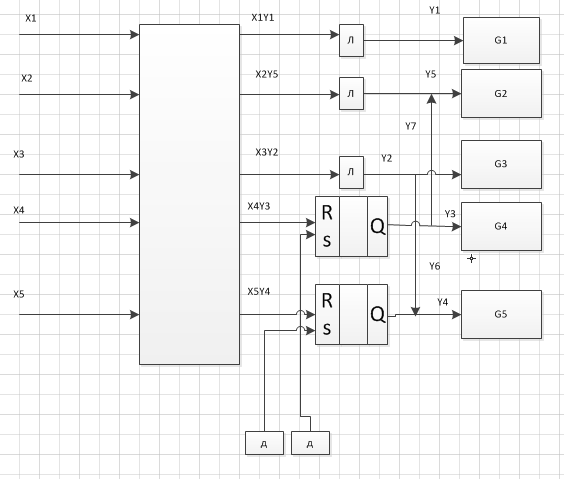
Рис.13.Обобщённая функциональная схема автомата
Где {x1,x2,x3,x4,x5} набор входных сигналов, КС – комбинационная схема, Д – дискретный датчик (0 1) , Л – логический элемент, определяющий выход, RS – триггер, {Y1,Y2,Y3,Y4,Y5,Y6,Y7} набор выходных сигналов.
В задание есть дополнительное условие, которое гласит, что при отсутствии детали в точке в необходимо осуществить переход в . Для выполнения этого условия мы воспользуемся RS – триггером (Рис.12).
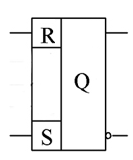
Рис.15. RS – триггер
RS триггер – триггер, который сохраняет своё предыдущее состояние при нулевых входах и меняет своё выходное состояние при подаче на один из его входов единицы. RS триггер является автоматом Мура с двумя устойчивыми состояниями, имеющий два входа R и S такие, что при S=1 и R=0 триггер принимает состояния 1, а при R=1 и S=0 состояние 0. В соответствие с состоянием, принимаемым триггером, вход S называет единичным входом, а вход R нулевым [2].
Из этого определения следует, что при подаче на вход S нуля (то есть датчик показывает отсутствие детали), а на вход R единицы выход становится равным нулю и осуществляется переход. В обратном случае, если показания с датчика будут показывать единицу, а на входе R будет нуль, то цикл продолжит свою работу без перехода.