

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Факультет – Институт кибернетики
Направление – Мехатроника и робототехника
Кафедра – Интегрированных компьютерных систем управления (ИКСУ)
Система управления сборочного производства на основе конечного автомата.
Курсовой проект
по курсу «Математические основы теории систем »
Вариант №9
Выполнил студент гр.8E10 __________ _____ Беляев А.С.
Подпись Дата И.О.Фамилия
Проверил преподаватель __________ _____ Рудницкий В.А.
Подпись Дата И.О.Фамилия
Томск 2013
Содержание
Задание…………………………………………………………………...….......3-4
Основные определения………………………………………………………...…5
Введение……………………………………………………………….……..……6
Кинематическая схема промышленного робота……………………..….………7
Матрица Денавита-Хартенберга………………..…………………….………8-10
Определение размеров манипулятора………………………………….………11
Рабочая зона…………………………………………………………….………..12
Координаты точек позиционирования………………………….……………...13
Перемещения манипулятора по точкам позиционирования.............................14
Перемещение из S2 в S1…………………………………………….………...15-16
Перемещение из S1 в S3…………………………………………………….……17
Перемещение из S3 в S4…………………………………………………..…..18-19
Перемещение из S4 в S5………………………………………………..……..20-21
Перемещение из S5 в S2………………………………………………….……....22
Перемещение при условии отсутствия детали в S3 из S3 в S5………………...23
Перемещение при условии отсутствия детали в S4 из S4 в S2………………...24
Временная диаграмма…………………………………………...........................25
Временная
диаграмма для условия при отсутствии
детали в точке
 ………26
………26
Временная
диаграмма для условия при отсутствии
детали в точке
 ………27
………27
Алгоритм движения конвейеров ……………………………………………28-30
Исполняемый алгоритм…………………………………………………………31
Описание конечного автомата………………………………………………….32
Описание абстрактного автомата……………………………………...……33-34
Граф функционирования устройства…………………………………………..35
Кодирование входных и выходных символов состояний…………………….36
Краткая СДНФ…………………………………………………….……………..37
Обобщенная функциональная схема структурного автомата……………..38-39
Заключение……………………………………………………………….…........40
Список литературы……………………………………………………….……...41
Задание
Для предложенного варианта компоновки и режима работы участка производства синтезировать систему управления на основе конечного автомата.
Габариты деталей для перемещения 0.15х0.15х0.1 м. Дистанция между деталями 0.1 м., расстояние от края конвейера до детали 0.1 м. Геометрический центр совпадает с точкой позиционирования схвата. Захватить деталь для последующего переноса возможно только в этом случае!
Выбрать элементы памяти и построить обобщённую функциональную схему автомата. Составить временную диаграмму работы и разработать оптимальный по быстродействию алгоритм функционирования системы. Направление движения деталей по конвейеру определяется направлением соответствующего вектора скорости. Детали выкладываются на конвейеры одновременно.
Разработать кинематическую схему промышленного робота для реализации режима работы технологического объекта. Реальными размерами пренебречь. На основе преобразований Денавита-Хартенберга рассчитать управляющее воздействия на степени подвижности. Определить рабочую зону и построить траекторию движения схвата.
Составить временную диаграмму работы и разработать оптимальный по быстродействию алгоритм функционирования системы.
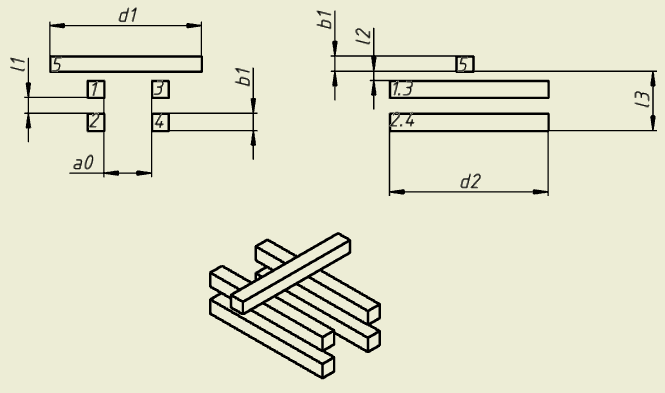
Рис.1. Расположение конвейеров
Размеры конвейеров, габариты деталей, скорости движения конвейеров представлены ниже:





Габариты деталей для перемещения 0.15х0.15х0.1 м
Дистанция между деталями 0.1 м., расстояние от края конвейера до детали 0.1 м.
 Режим
работы:
S2
S1
S3
S4
S5
S2
Режим
работы:
S2
S1
S3
S4
S5
S2
Условие: Если нет детали в S3: переход на S5.
Если нет детали в S4: переход на S2