

5. Статический метод управления линейным дисплеем.
При статическом управлении:
Все индикаторы постоянно включены в работу.
Для управления используют:
дешифраторы семисегментного кода
программную перекодировку.
Пример: четырехразрядный дисплей

1. С использованием дешифраторов семисегментного кода.
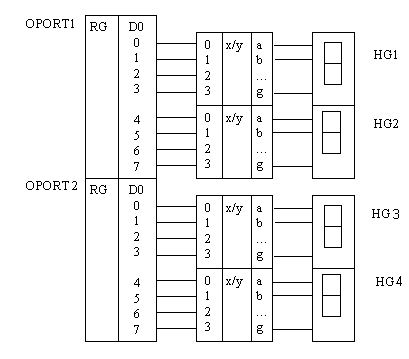
DISPLAY: LXI D, DATA ; Начальный адрес массива
LDAX D ; В (А) код для Ц1, Ц2
OUT OPORT1 ; Вывод на HG1, HG2
INX D
LDAX D ; В (А) код для Ц3, Ц4
OUT OPORT2 ; Вывод на HG3, HG4
RET
2. С использованием программной перекодировки:

Порты вывода:
OPORT1: для HG1
OPORT2: для HG2
OPORT3: для HG3
OPORT4: для HG4
DISPLAY: LXI D, DATA ; Начальный адрес массива
LDAX D ; В (А) код для символа 1
CALL CROSSCODE ; Подпрограмма перекодировки
OUT OPORT1 ; Вывод на HG1
INX D ; Чтение кода символа 2
LDAX D
CALL CROSSCODE
OUT OPORT2
.
.
.
OUT OPORT4
RET
Достоинства статического метода управления дисплеем:
простота программной реализации
простота схемной реализации
Недостатки:
большой потребляемый ток:
большое число соединительных проводов
данный метод удобно использовать, когда число индикаторов ≤ 4
6. ДинамичесКий метод управления линейным дисплеем.
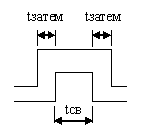
В каждый момент времени горит только 1 индикатор. Чтобы не было мерцания надо напряжение подавать сначала на сегменты, затем на электроды:
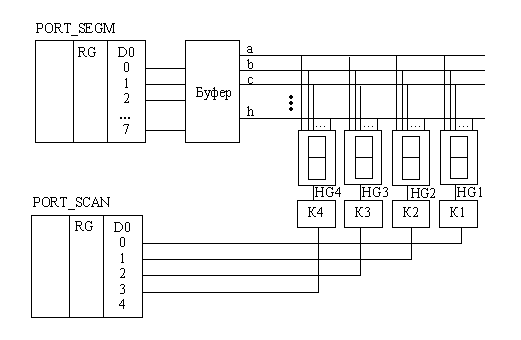
Порт вывода PORT_SEGM служит для возбуждения сегментов каждого индикатора.
Порт вывода PORT_SCAN управляет ключами К1-К4, замыкающими цепи общих электродов индикаторов дисплея. Высвечивается только тот символ на индикаторе, ключ которого замкнут.
Недостаток: микропроцессор не выполняет никакой другой работы, кроме управления дисплеем.
7. Виды ацп, схемы подключения и программы опроса ацп
Все АЦП по быстродействию делят на 2 группы:
1) быстрые;
2) медленные;
На выходе АЦП − буферы с тремя состояниями. Имеется спец. сигнал и вывод для управления выходными буферами − разрешение буфера (Output Enable, OE).
Имеется сигнал для подачи тактовой частоты от внешнего генератора (CLK).
AI − вход для подачи аналогового сигнала.
a − старт
b − начало преобразования
b ÷ с − преобразование
с − конец преобразования
d − на выходе появляется цифровой код
е − завершение вывода