

ПРАВИТЕЛЬСТВО САНКТ-ПЕТЕРБУРГА КОМИТЕТ ПО НАУКЕ И ВЫСШЕЙ ШКОЛЕ
Санкт-Петербургское государственное бюджетное образовательное учреждение среднего профессионального образования «ПЕТРОВСКИЙ КОЛЛЕДЖ» (СПб ГБОУ СПО «Петровский колледж») |
||||
Отделение информационно-промышленных технологий и судостроения. |
||||
|
||||
ДИПЛОМНЫЙ ПРОЕКТ |
||||
|
||||
РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ ЛИНИЕЙ |
||||
|
||||
|
Выполнил: |
|||
Кормилкин Константин Вячеславович |
||||
студент (ка) |
3005 |
группы |
||
|
|
|
||
специальность |
270116 Монтаж, наладка и эксплуатация электрооборудования промышленных и гражданских зданий |
|||
|
|
|||
Руководитель: |
||||
|
В.В. Лукашев |
|||
|
|
|||
Консультант: |
|
|||
|
И.О.Фамилия |
|||
|
|
|||
Санкт-Петербург, 2013г.
Содержание
Введение N
1. Система управления транспортной линии N
1.1. Поворотный стол. Конвейерная линия N
1.1.1. Назначение N
1.1.2 Технические характеристики N
1.1.3. Схема электрическая принципиальная, принцип действия, спецификация N
2. Расчетная часть N
2.1. Расчет питающего кабеля шкафа управления N
2.2. Расчет 3-х полюсного мотор-автомата QF1 N
2.2.1. Расчёт тока однофазного короткого замыкания
в точке К1 N
2.3. Расчет вводного автоматического выключателя шкафа управления QF2. N
2.3.1. Расчёт тока однофазного короткого замыкания
в точке К2 N
3. Монтажная часть N
4. Экономическая часть. Организация электромонтажных работ N
5. Охрана труда N
Заключение N
Список используемых сокращений N
Приложение
Список литературы N
Введение
По характеру изменения управляющего воздействия различают системы автоматической стабилизации, программного регулирования и следящие системы. По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые. По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными, дискретными и дискретно-непрерывными системами. По виду контролируемых изменений своих свойств различают не приспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры.
В зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника.
Ручное производство давно вышло из моды, и не является качественным производством. Предприятия заинтересованы в эффективном выпуске продукции, они вынуждены искать новые пути решения проблем, связанные с качеством выпускаемой продукции её количеством. На данный момент, одно из самых актуальных решений заключается в установке на производстве конвейерной линии, которая создает условия, обеспечивающие поэтапное выполнение технических операций; значительно упрощает производственный процесс.
Транспортная линия смонтирована в цехе сварки кузовов между цехами буфер-опций и цехом покраски кузовов на заводе ЗАО Ford Motor Company, расположенный в г. Всеволожск, промзона Кирпичный завод 1.
Автоматическая конвейерная линия предназначена для перемещения кузовов между рабочими местами и обеспечения остановок в зоне, в которой осуществляется технологические операции сварки элементов кузова
Транспортная линия состоит из последовательных приводных конвейерных линий (рольгангов) объединенных системой управления.
Система управления обеспечивает последовательное передвижение кузова между рабочими станциями и остановки на рабочих позициях с требуемой точностью.
1. Система управления транспортной линии
На рис. 1 представлена блок-схема системы управления линией, на которой обозначено:
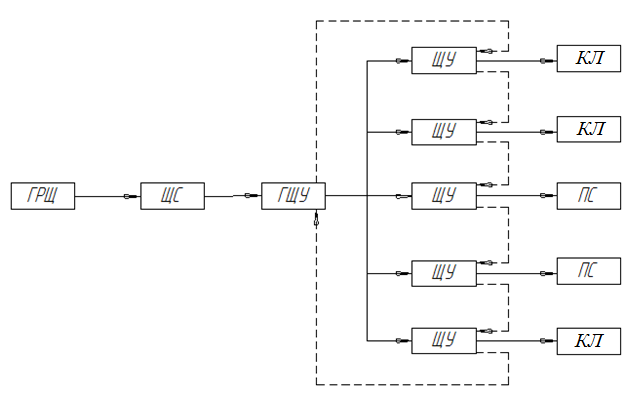
Рис. 1 Блок-схема системы управления транспортной линией
ГРЩ – главный распределительный щит;
ЩС – силовой щит;
ГЩУ – главный щит управления транспортной линией;
ЩУ – щит управления мотор-редуктором;
ПС – поворотный стол;
КЛ – Конвейерная линия.
Сплошные направленные линии – силовой кабель
Пунктирные линии – оптоволоконный кабель.
Оптоволоконный кабель служит для передачи различного рода информации;
Главный щит управления (ГЩУ) служит для управления всей транспортной линией, в частности: изменения режима работы транспортных линий и поворотных столов (например изменение скорости подачи кузовов, переход с автоматического управления на ручное и т.д.); диагностики неисправностей щитов управления и двигателей.
Щит управления электродвигателем выполняет роль транзита, в котором осуществляется коммутирование силовых контактов магнитных пускателей, в следствии чего двигатель запускается.
Для пуска двигателя питание подается из главного щита управления. Ток, протекая через щит управления, замыкает силовые контакты магнитного пускателя и двигатель начинает вращаться.