

7 Гидравлические следящие приводы
7.1 Общие сведения
Следящим гидроприводом называется автоматический привод в котором выходная величина (у) воспроизводит изменения входной величины (х).
Гидравлические следящие приводы широко применяются в машиностроении как средство автоматизации производственных процессов. В станкостроении гидравлические следящие приводы используются в копировальных устройствах различных металлорежущих станков, работающих oт копира или других задатчиков, для выполнения точных делительных и установочных операций, в агрегатных станках и автоматических линиях, составляют основу большинства систем циклового и числового программного управления.
Назначение следящего гидропривода – перемещать нагруженный рабочий орган по заданному закону и с заданной скоростью, обеспечивая при этом требуемое усиление выходной мощности.
По своей структуре гидравлические следящие приводы относятся к системам автоматического управления, в которых требуемые характеристики могут обеспечиваться при помощи разомкнутой или замкнутой цепи управления. Недостатком автоматических систем разомкнутого управления является невозможность получить строгое соответствие между входом и выходом из-за неизбежного наличия возмущающих воздействий. Требуемой характеристики управления, т. е. строгого соответствия между входом и выходом, можно достичь при помощи замкнутой цепи управления (компенсационная схема), в которой результат регулирования автоматически сравнивается (обратная связь) с сигналом управления (программой), а получаемое рассогласование вызывает воздействие, автоматически компенсирующее это рассогласование.
Для гидравлических и пневматических систем характерными являются динамические процессы, при которых движение рабочей среды будет неустановившемся. Станок, как и другое устройство, где необходимо поддерживать в заданных пределах либо изменять по заданному закону значения одной или нескольких физических величин называют регулируемым объектом.
Комплекс устройств, осуществляющих автоматическое регулирование, образует автоматический регулятор. Структурная схема системы автоматического регулирования (САР) в виде замкнутой цепи, состоит из двух элементов.
Рисунок 7.1 – Схема автоматического регулирования Р – регулятор; ОР – объект регулирования: х3 – заданное значение; хр – регулирующее воздействие; хв – возмущающее воздействие; ОС – обратная связь
В этой схеме текущее значение регулируемой величины у сравнивается с заданным значением х3 и выявляется ошибка δ = х3 – у. Для уменьшения ошибки до допустимых пределов регулятор оказывает регулирующее воздействие хр на регулируемый объект. Ошибки в САР возникают в следствии возмущающих воздействий хв на регулируемый объект. В рассматриваемой схеме реализуется основной принцип построения САР в использовании отрицательной обратной связи. Регулирующее воздействие формируется в зависимости от изменения регулируемой величины, от возмущающего и задающего воздействия.
При исследовании работы гидравлических систем автоматического управления важное значение имеет динамика гидропривода.
Уравнение динамики исполнительного органа гидравлического привода, описывающее движение поршня, как твердого тела в соответствии с законами механики
![]() ,
,
где т – приведенная масса подвижных частей и рабочей жидкости к поршню; рp и рП.С. – давление жидкости в рабочей полости и в полости слива; ωП и f – площади поршня и эффективная площадь; R и Р – сила трения и полезная нагрузка; х – перемещение поршня.
Уравнение представляет упрощенную математическую модель динамики ГП при условии постоянства в процессе движения поршня, рабочего давления и противодавления в полостях гидроцилиндра, сил трения и полезных нагрузок, сопротивления гидросистемы. Модель справедлива для стационарных процессов в условиях установившегося движения рабочего органа.
В гидравлической следящей системе (рис. 7.2) чувствительный элемент ЧЭ через щуп получает информацию, например от копира, о величине х необходимого перемещения и передает эту информацию в датчик рассогласования ДР. Сюда же по цепи обратной связи поступает измеренная каким-либо устройством выходная величина (перемещение рабочего органа). В датчике рассогласования сравнивается входная х и выходная у величины, в результате чего выделяется сигнал ошибки (рассогласования) δ = х – у, поступающий на вход гидроусилителя. Очевидно, что гидродвигатель (следящая система) работает только тогда, когда имеется сигнал рассогласования. Следовательно, рассмотренному следящему гидроприводу всегда присуща ошибка слежения (рассогласование).
Конструктивно гидравлический следящий привод состоит из трех основных узлов – ввода информации, гидроусилителя и исполнительного механизма (рис. 7.2).
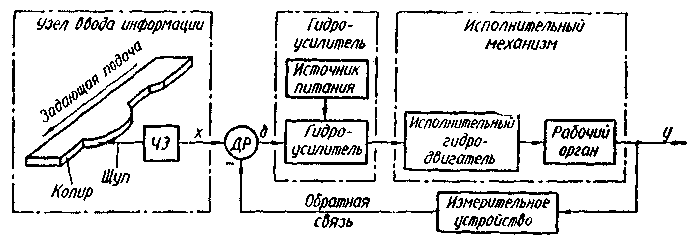
Рисунок 7.2 – Функциональная схема гидравлического следящего привода
Узел ввода информации содержит задающее устройство, которое вырабатывает и (при помощи щупа и чувствительного элемента) передает на вход гидроусилителя управляющий сигнал. Для большинства гидравлических следящих приводов управляющий сигнал поступает в гидродвигатель не непосредственно, а через усилитель, имеющий источник мощности. В гидроусилителе, являющемся гидравлическим устройством управления, мощность входного сигнала усиливается за счет энергии внешнего источника питания. Конструктивно гидроусилитель может быть выполнен в виде отдельного элемента или представлять собой одно целое с датчиком рассогласования и гидродвигателем. Исполнительный механизм содержит гидродвигатель вращательного (гидромотор) или поступательного (гидроцилиндр) движения и соединенный с ним рабочий орган.
Применяемые гидравлические следящие приводы различают по принципу действия, структуре и конструкциям следящих систем и их элементов, по характеристикам работы, количеству следящих перемещений, способу регулирования скорости слежения, количеству каскадов усиления и т. д.