

59. Энергетические показатели электропривода
Один и тот же алгоритм функционирования имеющий одинаковые технологические параметры , а также технические показатели можно реализовать с различными энергетическими затратами.
Если учесть, что
ЭП в настоящее время потребляет около
70% всей вырабатываемой электроэнергии,
становится, очевидный, что цена
неоправданных потерь электрической
энергии весьма велика. К основным
энергетическим показателям ЭП относятся:
КПД
![]() ,
коэффициент мощности
,
коэффициент мощности
![]() ,
обобщенный критерий энергетической
эффективности
,
обобщенный критерий энергетической
эффективности
![]() .
.
5.1 КПД ЭП
Функционирование
ЭП в процессе преобразования или передачи
энергии
![]() неизбежно
сопровождается потерями
неизбежно
сопровождается потерями
![]() .
Весьма важно – соотношение между
и
,
которое в общем, виде носит название
КПД:
.
Весьма важно – соотношение между
и
,
которое в общем, виде носит название
КПД:
![]() (117*)
(117*)
В частном случае,
если ЭП работает в режиме
![]() ,
т.е. в режиме с
,
т.е. в режиме с
![]() ,
который может быть представлен в виде
нагрузочной диаграмм (рис.126).
,
который может быть представлен в виде
нагрузочной диаграмм (рис.126).
В этом случае:
![]() (118)
(118)
В частном случае,
если
![]() :
:
![]() (119)
(119)

Рис.126 Нагрузочная диаграмма
Такое выражение для КПД обычно применяют при паспортизации различного типа устройств, где используется понятие номинального КПД:
![]() (120)
(120)
При этом обычно составляются графические зависимости:
![]()
![]() -
коэффициент загрузки
-
коэффициент загрузки
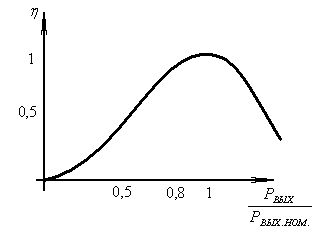
Рис.127 Зависимость КПД от коэффициента загрузки
Выражение (118), (119), (120) представлены для мгновенных мощностей и как, следствие не учитывают различные режимы работы ЭП, а также их длительности.
Обычно переход от соотношения (118), (119) и (120) к выражению (117*) осуществляется с помощью интегрирования выражений (118), (119), (120). В частности для циклических процессов наиболее универсальным и точным значением КПД является циклический КПД:
![]() (121)
(121)
где
![]() -
переданная (преобразованная) энергия
за цикл
-
переданная (преобразованная) энергия
за цикл
![]() -
потери энергии за цикл
-
потери энергии за цикл
 (122)
(122)
 (123)
(123)
Но, чтобы иметь точное графическое представление о цикловом КПД необходимо ввести понятие о так называемом, использований КПД. Для одного и того же циклического процесса КПД, рассчитанные по выражениям (121) и (118) могут существенно отличаться. В этой связи не имеет смысла и зачастую приводит к ошибке применяемое на практике сравнение различных КПД без учёта режима их работы. Например: «Реостатное регулирование не экономично, а регулирование по системе преобразователь – двигатель экономично, есть ничто иное, как некомпетентный штамп. Фактическая оценка эффективности может быть сделана только с учётом особенностей режимов работы ЭП, а также их продолжительности. Чтобы проиллюстрировать это выражение рассмотрим следующий пример:
Пусть ЭП,
обеспечивающий регулирование скорости
в диапазоне
![]() ,
,
![]() ,
работает в циклическом режиме со
скоростями вращения
,
работает в циклическом режиме со
скоростями вращения
![]() ,
на каждой ступени цикла привод работает
одинаковое время:
,
на каждой ступени цикла привод работает
одинаковое время:
![]()
В этом случае:
 ,
где
,
где
![]() -
диапазон регулирования.
-
диапазон регулирования.
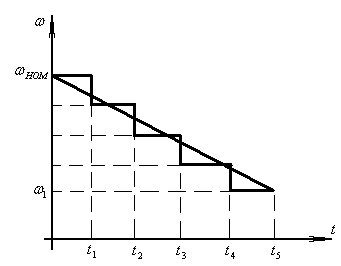
Рис.128 Временная диаграмма
Рассмотрим 2 варианта регулирования скорости:
1. Реостатное – изменение активного сопротивления цепи ротора.
2. регулирование по системе П-Д .
Чтобы найти
выражение, соответствующее цикловому
КПД по формуле (121) для обоих вариантов
найдём выражение для потерь мощности
![]() .
.
В случае реостатного регулирования (АД):
![]()
Потери мощности для того же двигателя для системы ПД:
![]() -
при одинаковой продолжительности
ступеней цикла
-
при одинаковой продолжительности
ступеней цикла
где ![]() -
коэффициент, учитывающий дополнительные
потери в преобразовательном устройстве
(ПУ):
-
коэффициент, учитывающий дополнительные
потери в преобразовательном устройстве
(ПУ):
![]()
тогда, подставляя эти значения в уравнения (4) и (5) получим:
1. Реостатное
регулирование:
![]()
2. П-Д:
![]()
Если для обоих представленных выражений рассчитаем функцию, выражающую зависимость отношения циклового КПД к паспортному от величины диапазона регулирования для различных вариантов, то получим следующие графические зависимости (рис.129):
![]()
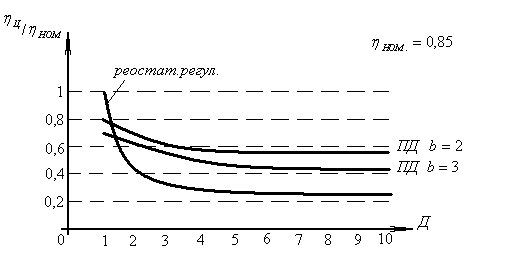
Рис.129 Графическая зависимость отношения циклового КПД к паспортному от величины диапазона регулирования для различных вариантов.
По построенным
зависимостям видно, что даже при очень
хороших условиях
![]() и
и
![]() (
-
характерен для регулирующей системы
УСП-Д).
(
-
характерен для регулирующей системы
УСП-Д).
Система П-Д имеет
преимущества по
![]() перед реостатным, лишь при условии что
перед реостатным, лишь при условии что
![]() .
.
При малых диапазонах
![]() реостатное
регулирование более энергетически
эффективно.
реостатное
регулирование более энергетически
эффективно.
Если же
![]() (система
Г-Д, то регулирование по системе П-Д
предпочтительнее, только при диапазонах
более 3:1). Естественно при этом нельзя
забывать и о других преимуществах
системы П-Д.
(система
Г-Д, то регулирование по системе П-Д
предпочтительнее, только при диапазонах
более 3:1). Естественно при этом нельзя
забывать и о других преимуществах
системы П-Д.
Случай разноправленного потока энергии
Говоря об энергетической эффективности, мы не учитывали при определении КПД разнонаправленность потоков энергии, характерных для некоторых режимов. В частности при оценке полезности того или иного режима необходимо учитывать, что например для ряда случаев торможение является не менее, а зачастую более полезным, чем двигательный режим.
При этом динамические характеристики будут иметь вид:
![]()
![]()

Рис.130 Динамические характеристики
При определении
по
(3) необходимо использовать абсолютное
значение
![]() :
:
 (124)
(124)