

43. Регулируемый эп буровых насосов.
Для привода буровых
насосов на средние глубины бурения
используют асинхронный вентильный
каскад. АВК обеспечивает регулирование
скорости от 100-50 % от
![]() ,
причем энергия скольжения возвращается
в электросеть. АВК состоит из АД,
трехфазного выпрямительного моста,
преобразующего энергию скольжения в
энергию постоянного тока, АИ, с помощью
которого энергия постоянного тока
преобразуется в энергию переменного
тока, которая через трансформатор
возвращается в сеть.
,
причем энергия скольжения возвращается
в электросеть. АВК состоит из АД,
трехфазного выпрямительного моста,
преобразующего энергию скольжения в
энергию постоянного тока, АИ, с помощью
которого энергия постоянного тока
преобразуется в энергию переменного
тока, которая через трансформатор
возвращается в сеть.
Мощность скольжения определяется по формуле:
![]() .
.
АВК подключается к АД с фазным ротором.
Вариант регулирования скорости с помощью АВК реализован на буровой установке БУ-3200. В буровых установках для бурения скважин (6,5-10 км) для ЭП буровых насосов используют ЭД постоянного тока с регулированием скорости по системе ТП-Д. буровыми насосами с данной системой регулирования ТП-Д оснащены буровые установки БУ-6500. Регулируемый ЭП бурового насоса может быть также реализован на базе вентильного ЭД.
44. Математическое моделирование электромеханических переходных процессов в электроприводах
Общие понятия:
Переходным процессом (ПП) в электроприводах называют режимы, которые возникают при переходе от одного установившегося состояния к другому. Основным признаком возникновения ПП является изменение угловой скорости вращения. Одновременно изменяются моменты и силы, действующие на элементы электропривода, а также тепловое состояние этих элементов. В зависимости от характера возмущающих воздействий различают:
а) естественные ПП – пуск, торможение, регулирование скорости вращения, изменение нагрузки на валу;
б) искусственные ПП, которые возникают в результате неисправностей в двигателе, системе передачи, в системе управления или в производственном механизме. При анализе ПП удобно разделять переходные режимы на 2 вида:
1) электромеханические ПП;
2) тепловые ПП.
1) Электромеханические переходные процессы
Любой электромеханический ПП в ЭП-х, который характеризуется одновременным изменением угловой скорости, а также моментов воздействующих на элементы ЭП описываются:
![]() .
(1)
.
(1)
В зависимости от
постановки задачи анализ ПП может
заключаться либо в определении временных
характеристик ПП-а (длительность пуска,
длительность торможения, время изменения
скорости от ω1 до ω2) при
известных величинах и характера изменения
моментов. Либо определения моментов ЭП
при известных временных показателях.
При анализе используют не классическое
уравнение движения, а уравнение движения
в инженерных координатах. Замена
![]()
![]()
![]() тогда
тогда
![]() ,
откуда следует
,
откуда следует
![]() .
(2)
.
(2)
Уравнение (2) – уравнение движения в инженерных координатах.
G – сила тяжести,
D – приведенный диаметр,
g – ускорение свободного падения,
GD2 – маховый момент.
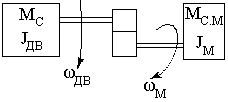
ЭП как система содержит в своей структуре передаточное звено (звенья) и имеется как минимум 2 вала, вращающиеся с различными скоростями. Поэтому для анализа электромеханического ПП необходимо привести все статические моменты сопротивления и моменты инерции к одному валу (к скорости одного вала (двигателя)). Приведение статических моментов сопротивления и моментов инерции отдельных элементов ЭП К валу двигателя:
МС.М - ? J - ?
![]()
 ,
откуда МС:
,
откуда МС:![]()
![]()
![]()
![]() .
2
Анализ электромеханических переходных
процессов
.
2
Анализ электромеханических переходных
процессов
Определение длительности ПП при известных величинах и характере изменения моментов. При любом характере изменения моментов решение задачи в общем виде имеет вид:
![]() ,
откуда
,
откуда
![]() и соответственно
и соответственно
![]() .
.
В зависимости от того какой характер имеют зависимости изменения М и МС от ω сложность решения задачи м/б различной.
Так, если вращающий момент двигателя изменяется нелинейно, МС – const. Пример: АД – поршневой насос. При решении такой задачи вводится эффективный момент двигателя, МЭФ, который определяется по паспортным данным асинхронных двигателей с помощью эмпирических формул различной степенью точности. Время пуска определяется как:
![]() ,
,
![]() .
.
В случаях, когда и вращающий ЭММ изменяется нелинейно и статический момент, МС изменяются также нелинейно, использование точных аналитических методов становится невозможным, поэтому при решении таких задач применяют либо приближенные графические методы расчета, либо более точные и универсальные – графоаналитические методы, либо более удобные, но менее универсальные - алгоритмические.
В качестве графического метода расчета является метод пропорций. В качестве графоаналитического – метод площадей. В качестве алгоритмического – метод Симпсона.
Все перечисленные
методы расчета основаны на том
предположении, в соответствии с которым
бесконечно малые приращения ω и t,
т. е. dω и dt
заменяются малыми конечными:![]() ,
,
![]()
Уравнение движения
двигателя электропривода:
![]() .
.
Для метода пропорций существенным является уравнение:
![]() .
.
Графический метод решения уравнения движения обладает преимуществом, которое связано с физичностью процесса, но не обладает точностью, а также громоздок.
Наиболее универсальным и достаточно точным (по сравнению с алгоритмическими методами), обеспечивающим более точное совпадение с экспериментальными данными является графоаналитический метод площадей.
Последовательность расчета времени запуска двигателя рассмотрим с помощью следующего примера: АД с кз ротором приводит во вращение центробежный насос.
Последовательность расчета:
Уравнение
механической характеристики АД .
.
Уравнение
механической характеристики насоса
![]() ,
,
Уравнение совместной механической характеристики : Мд() = М() - Мс().

Разбиваем ось координат на ряд участков I, при этом, 1 =2 = … =i при этом точность расчета будет зависеть от количества участков разбиения.
Совместная механическая характеристика механизма заменяется аппроксимирующей ломаной кривой и считается, что на каждом участке разбиения
![]() Общая
длительность пуска
Общая
длительность пуска
![]() ,где
,где
![]() –
определяется для каждого участка
разбиения по формуле
–
определяется для каждого участка
разбиения по формуле
![]() .
.

Суммарное время разгона электропривода до номинальной скорости
Расчет времени торможения производим по методу площадей, аналогично предыдущему пункту.
50.3 Тепловые переходные процессы в электроприводах
Процесс работы ЭД сопровождается потерями мощности (активной), которая складывается из потерь в обмотках (эл. потерь), сердечника (магнитных потерь) и механической системы (мех. потерь). Эти потери выражаются в виде нагрева отдельных агрегатов двигателя, количество тепла, выделяющееся в двигателе dQ:
![]() ,
,
dt – длительность работы двигателя, ΔP – потери мощности.
В
начальный период работы двигателя после
его включения большая часть выделившегося
тепла будет приходиться на нагрев самого
двигателя, часть рассеивается в окружающую
среду (ОС). По мере нагрева ЭД доля в ОС
будет увеличиваться, доля тепла, идущего
на нагрев двигателя будет уменьшаться.
При некоторой температуре Д, равной
установившейся (![]() )
дальнейший нагрев Д прекращается и все
тепло выделившееся в Д рассеивается в
ОС, устанавливается т. н. установившийся
тепловой режим. Значение температуры,
равной установившейся будет зависеть
от нагрузки Д.
)
дальнейший нагрев Д прекращается и все
тепло выделившееся в Д рассеивается в
ОС, устанавливается т. н. установившийся
тепловой режим. Значение температуры,
равной установившейся будет зависеть
от нагрузки Д.
Реальные тепловые процессы, происходящие в ЭП являются весьма сложными, поэтому для удобства анализа этих процессов примем следующие допущения:
1) двигатель представляет из себя абсолютно однородное тело, теплоемкость по всему объему тела Д одинакова;
2) теплоотдача со всех точек поверхности Д также одинакова.
Для анализа тепловых процессов используются следующие величины:
dQ – общее количество тепла, выделившееся в двигателе; ккал
dQПОГЛ – количество или часть этого тепла, идущее на нагрев самого двигателя;
dQОТД – часть этого тепла рассеивающееся в ОС; ккал
ΔР – потери мощности, кВт;
С – теплоемкость, ккал;
А – теплоотдача, ккал/(гр.·с);
τ – превышение температуры двигателя (температура перегрева двигателя),
![]() .
.
![]() -
нормирующая температура,
-
нормирующая температура,
![]() .
.