

34. Электропривод буровых лебедок.
Общая характеристика режима работы электропривода БЛ.
Кроме подъема и спуска КБТ с помощью буровой лебедки часто осуществляют свинчивание и развинчивание труб, их перенос и установку, подъем и опускание незагруженного элеватора, также подачу долота на забой.
В современных буровых установках применяют вспомогательные двигатели для выполнения вспомогательных работ. В этом случае буровая лебедка используется только для подъема и спуска КБТ. Причем для подъема КБТ служат приводные двигатели лебедки, а для спуска электромагнитные тормоза индукционного или электропорошкового типа или приводные двигатели в режиме динамического или рекуперативного торможения.
П одъем
КБТ состоит их отдельных циклов, число
которых равняется числу свечей. За время
одного цикла происходит подъем на высоту
одной свечи (25-37м.), затем ее отвинчивают,
переносят и устанавливают, после чего
цикл повторяется.
одъем
КБТ состоит их отдельных циклов, число
которых равняется числу свечей. За время
одного цикла происходит подъем на высоту
одной свечи (25-37м.), затем ее отвинчивают,
переносят и устанавливают, после чего
цикл повторяется.
Процесс перемещения бурильных труб на одну свечу характеризуется наличием трех периодов.
1. Разгон колонны в течение времени tр, т.е. увеличение скорости от нуля до некоторого установившегося значения.
2. Равномерное движение с установившейся скоростью Vуст в течение времени tу.
3. Замедление колонны, т.е. уменьшение скорости от установившегося значения до нуля с посадкой на клинья в течение времени tз (tв – время вспомогательных операций или время холостого хода).
Рис. 5. Диаграммы скорости и момента.
По мере подъема КБТ ее вес (Q) дискретно уменьшается и соответственно изменяется момент статического сопротивления (Мс) на валу приводного электродвигателя. Причем в период разгона КБТ момент Мр на валу электродвигателя будет больше статического момента Мс за счет дополнительного усилия для преодоления инерции при разгоне. При замедлении колонны момент Мз будет меньше статического момента на величину динамического момента при торможении.
Диаграммы скорости и момента представлены на рис. 5.
Так как время работы привода лебедки при подъеме КБТ прерывается паузами для отвинчивания, переноса и установки труб, спуска крюка с незагруженным элеватором, режим работы привода лебедки повторно-кратковременный, с относительной продолжительностью включения 25-40%.
1. Электропривод бл на базе асинхронного двигателя с фазным ротором.
ЭП буровой лебедки ранее выпускавшихся буровых установок оснащен АД с фазным ротором и релейно-контактными системами переключений ступеней сопротивлений в цепи ротора. Для уменьшения числа ступеней, в последней ступени использован активно-индуктивный контур.
С
Рис.
7 Рис. 8. Структурная схема асинхронного
электропривода с фазным ротором.
Рис. 8. Механические
характеристики асинхронного двигателя
с фазным ротором.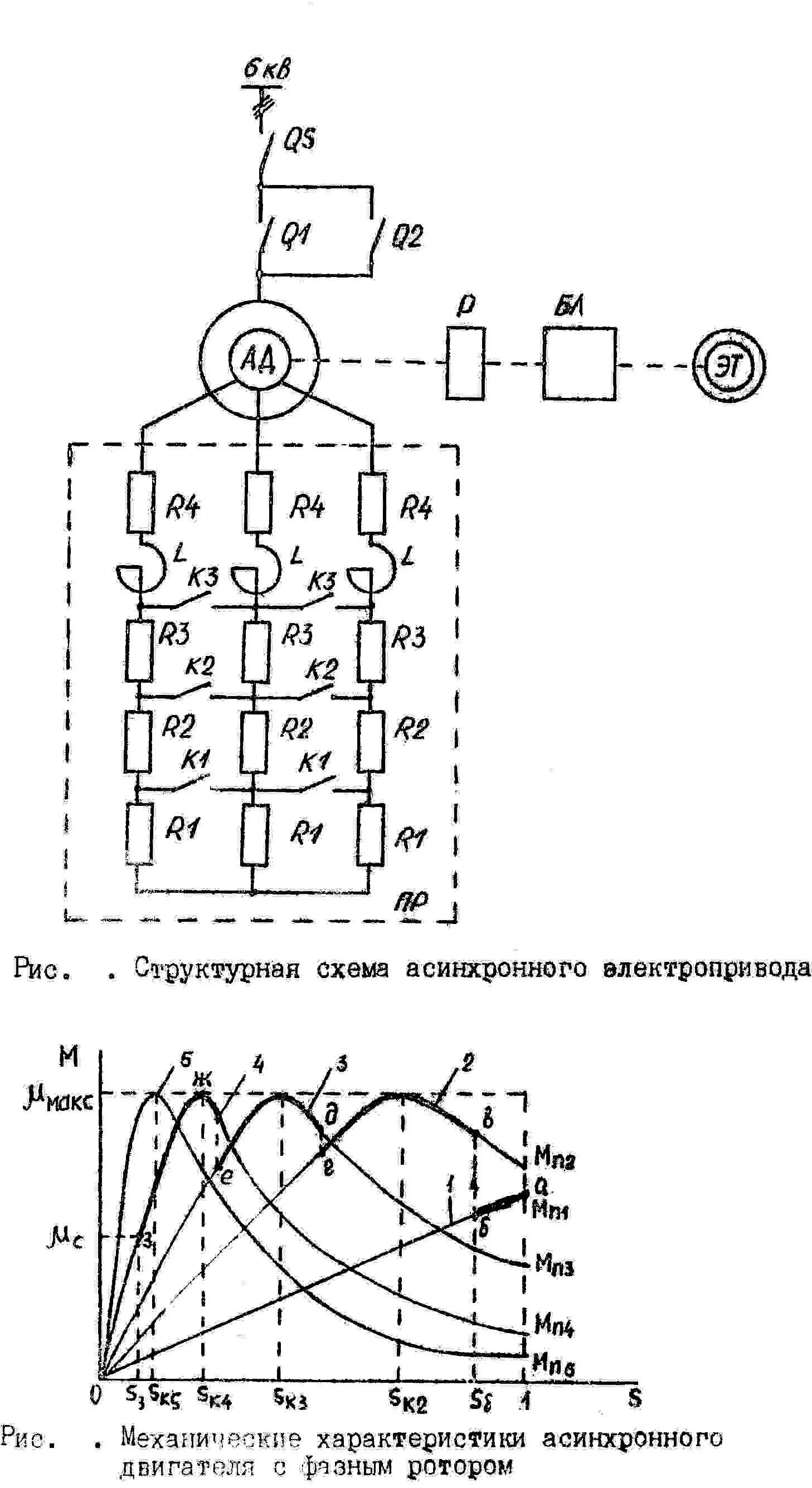

Пуск и разгон АД после включения разъединителя QS и реверсивного контактора Q1, Q2 производится под нагрузкой. При этом для успешного разгона необходимо, чтобы в процессе всего разгона момент, развиваемый двигателем, был больше статического момента сопротивления, причем на такую величину, чтобы обеспечить разгон за заданное время. Для обеспечения высокого пускового момента в цепь ротора включаются пусковые реостаты ПР, а также дроссель (катушка индуктивности) L. Кроме трех пусковых реостатов в каждую фазу в цепь ротора введен невыключаемый реостат R4.
П роцесс
пуска двигателя начинается при всех
включенных реостатах, т.е. по механической
характеристике 1 (рис. 8). При этом двигатель
имеет пусковой момент Мп1 (точка
«а»). Пусковой момент Мп1 составляет
обычно не более 60% от Ммакс. Это
необходимо для снижения механических
ударов при выборе зазоров и люфтов в
трансмиссиях. На участке аб двигатель
разгоняется по 1-ой характеристике. К
моменту достижения точки «б» выбираются
все зазоры и люфты и должен начаться
подъем колонны. Поэтому в момент
достижения точки «б» автоматически
включаются контакты К1 и реостаты R1
оказываются закороченными (выключенными).
При этом рабочая точка с характеристики
1 переходит на 2 в точке «в». Точке «в»
соответствует достаточно большой
развиваемый двигателем момент, которого
достаточно для трогания колонны с места
и разгона по характеристике 2. В точке
«г» автоматически включаются контакты
К2, что приводит к выключению реостатов
R2. Рабочая точка переходит
на характеристику 3 в точку «д». В схеме
остаются только реостаты R3
и R4.
роцесс
пуска двигателя начинается при всех
включенных реостатах, т.е. по механической
характеристике 1 (рис. 8). При этом двигатель
имеет пусковой момент Мп1 (точка
«а»). Пусковой момент Мп1 составляет
обычно не более 60% от Ммакс. Это
необходимо для снижения механических
ударов при выборе зазоров и люфтов в
трансмиссиях. На участке аб двигатель
разгоняется по 1-ой характеристике. К
моменту достижения точки «б» выбираются
все зазоры и люфты и должен начаться
подъем колонны. Поэтому в момент
достижения точки «б» автоматически
включаются контакты К1 и реостаты R1
оказываются закороченными (выключенными).
При этом рабочая точка с характеристики
1 переходит на 2 в точке «в». Точке «в»
соответствует достаточно большой
развиваемый двигателем момент, которого
достаточно для трогания колонны с места
и разгона по характеристике 2. В точке
«г» автоматически включаются контакты
К2, что приводит к выключению реостатов
R2. Рабочая точка переходит
на характеристику 3 в точку «д». В схеме
остаются только реостаты R3
и R4.
Когда в цепи ротора останутся только дроссель и невыключаемые реостаты R4, процесс разгона по характеристике 4 продолжается до тех пор, пока момент Мi, развиваемый двигателем, не снизится до статического момента сопротивления Мс на валу, обусловленного весом колонны, то есть до точки «з», где процесс разгона заканчивается и начинается этап подъема колонны с установившейся скоростью.
Дроссель L в цепи ротора служит для снижения бросков момента, а также бросков тока ротора и статора при переходе с одной характеристики на другую.
Частота тока ротора f2 изменяется в процессе разгона от f1=50 Гц при пуске до 1…2 Гц при номинальных оборотах. При снижении частоты f2 постепенно снижается индуктивное сопротивление и плавно растет ток ротора, что и приводит к снижению бросков тока и момента при переключении с одной характеристики на другую.
Р
Рис.
9. Функциональная схема (а) и механические
характеристики (б) асинхронного
электропривода буровой лебедки с
тиристорным регулятором скольжения
(ТРС):
СИФУ – система
импульсно-фазового управления
выпрямителем; СУШ – система управления
шунтирующими тиристорами; ДСК – датчик
скольжения.
1 – естественная
характеристика; 2 – характеристика на
третьей ступени пускового реостата
(Rп=R3)
и при полностью открытом преобразователе
UZ; 3 – характеристи-ка на
второй ступени пускового реостата
(Rп=R2+R3);
4 – характеристика на первой ступени
пускового реостата (Rп=R1+R2+R3);
5-11 – характеристики двигателя на первой
ступени пускового реостата при различных
значениях напряжения управления.

