

21. Потери мощности и энергии в системе электроснабжения и пути их снижения.
Электрическая
нагрузка, как правило, имеет переменный
характер, и поэтому потери мощности и
электроэнергии в линиях будут изменяться
с изменением нагрузки. В зависимости
от наличия данных по проектируемому
объекту потери мощности и электроэнергии
можно рассчитывать по среднеквадратичному
току Iск, принимая время
действительной работы линии Тдейств,
или по максимальному току Iмакс
при времени потерь
![]() ,
,
Среднеквадратичный ток представляет собой эквивалентный ток, который, проходя по линии за время Т действительно вызывает те же потери, мощности и электроэнергии, что и действительный изменяющийся ток за то же время. Время потерь - это расчетное время, в течение которого линия, работая с неизменной максимальной нагрузкой Iмакс, имела бы те же потери мощности и электроэнергии, что и при работе по действительному переменному графику эл. нагрузки.
Среднеквадратичный ток определяется по среднему току Iср и коэффициенту формы графика нагрузки kф:
![]()
Здесь W—расход активной электроэнергии (кВт*ч) за время Тдейств (сутки, год); cos срв - средневзвешенный коэффициент мощности.
С достаточной для практических расчетов точностью принимают:
а) при любом числе (более двух) токоприемников с длительным режимом работы и числом токоприемников с повторно-кратковременным режимом более 20 коэффициент kФ = 1,05— 1,1,
б) при числе
токоприемников с повторно-кратковременным
режимом меньше 20:![]()
где nЭФ - эффективное (расчетное) число токоприемников с номинальной мощностью Рном и максимальной мощностью одного двигателя Рмакс; ПВ — относительная продолжительность включения токоприемников.
Потери активной
мощности и электроэнергии в линиях:
![]()
Потери реактивной
мощности и реактивной, энергии:
![]()
где R — активное сопротивление;
Х — индуктивное или емкостное сопротивление воздушной или кабельной линии.
Если известны
расход электроэнергии W, учтенный
за определенное время (сутки, год), и
максимальная нагрузка Рмакс, то можно
найти время Тмакс, в течение которого
данная линия.работая с максимальной
нагрузкой, может передать эту энергию:
![]()
Величина Тмакс = ТИ называется временем использования максимума нагрузки. Она определяется характером и сменностью работы потребителя и составляет в год (ч):
Для осветительных нагрузок ........... 1500—2000
Для односменных предприятий .......... 1800—2500
Для двухсменных предприятий . . . . ... . . . 3500—4500
Для трехсменных предприятий .......... 5000—7000
Зная величины W и Тмакс, можно определить максимальный ток за рассматриваемый промежуток воемени (сутки год)
![]()
При расчете потерь мощности и электроэнергии по максимальному току следует учитывать время потерь , которое зависит от времени использования максимума Тмакс и коэффициента мощности cos . Зная эти величины, время потерь находят по кривым зависимости = f (Тмакс, cos ) (рис. 2.10), а затем определяют активные и реактивные потери электроэнергии:
![]()
Зная потери электроэнергии, можно найти соответствующие потери мощности:
![]()
Следует отметить, что использование графиков зависимости
= f (Тмакс, cos ) (рис. 2.10) при определении потерь мощности в элементах систем электроснабжения приводит к погрешностям до 10%.
Поэтому если требуется определить более точные значения потерь, то рекомендуется представить систему передачи мощности Р и Q в виде Г-образного четырехполюсника с напряжениями U1 U2 и тогда, если сопротивление линии передачи составляет R за время Т потери электроэнергии составят:
![]()
где kФ.А kФ.Р - коэффициенты формы графиков активной и реактивной нагрузки
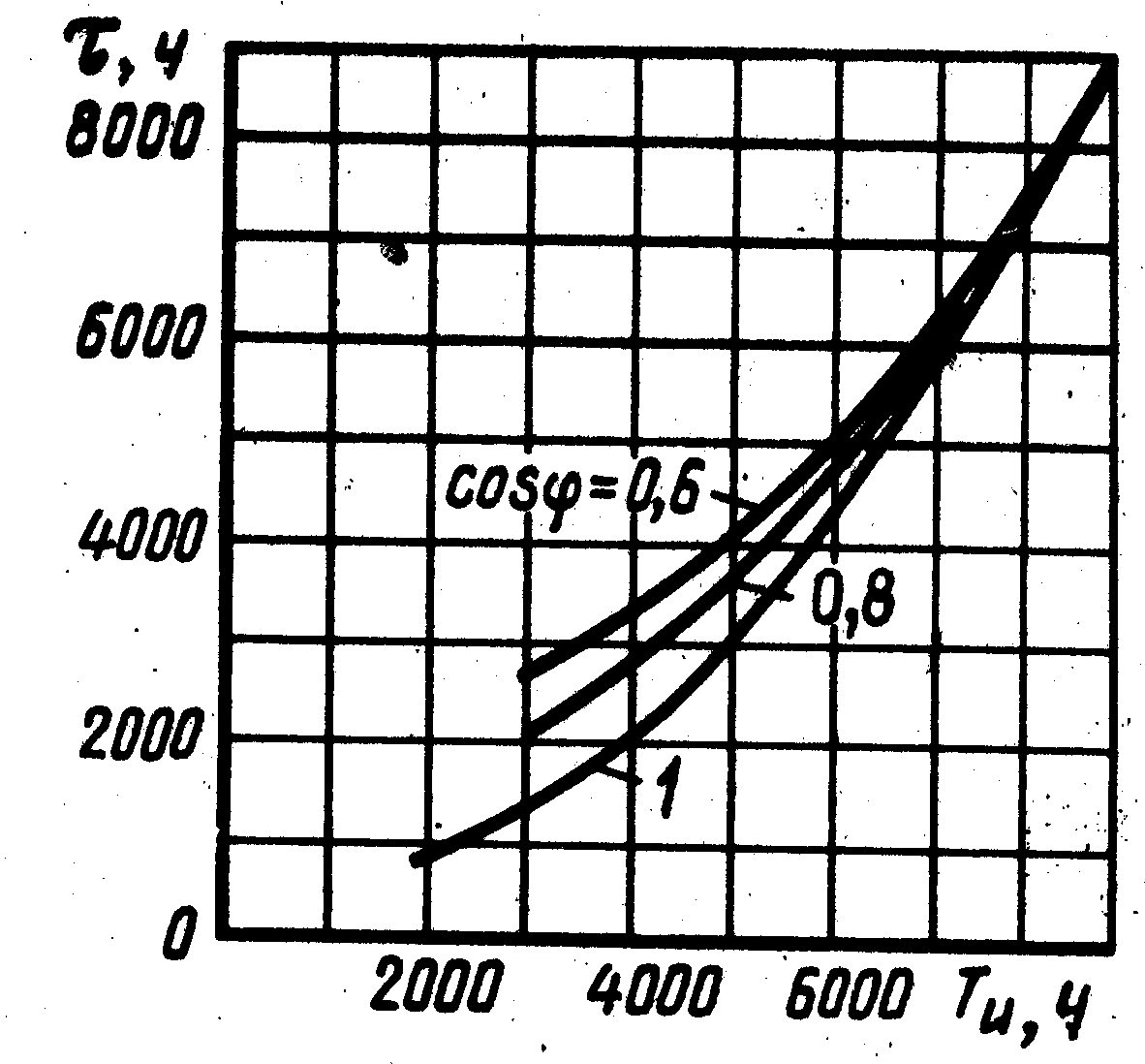
Рисунок 2.10 – Графики для определения времени потерь
Потери мощности и электроэнергии в трансформаторах.
Потери мощности в трансформаторах слагаются из потерь активной ( Рт) и реактивной ( Qт) мощности.
Потери активной
мощности состоят в свою очередь из
потерь на нагревание обмоток трансформатора
Р,
зависящих от тока нагрузки, и потерь на
нагревание стали
Рст,
не зависящих от тока нагрузки. Потери
мощности на нагревание обмоток
трансформатора:
![]()
Тогда полные
активные потери:
![]()
где RТ
— активное сопротивление обмоток
трансформатора, определяемое по величине
потерь в меди
Рм,
мощности трансформатора Sном,
номинальному напряжению Uном:
![]()
Потери реактивной
мощности также слагаются из двух
составляющих: потерь
Q,
вызванных рассеянием магнитного потока
в трансформаторе и зависящих от квадрата
тока нагрузки, и потерь на намагничивание
трансформатора
Q![]() ,
не зависящих от тока нагрузки и
определяемых током холостого хода .
Потери мощности, вызванные рассеянием:
,
не зависящих от тока нагрузки и
определяемых током холостого хода .
Потери мощности, вызванные рассеянием:
![]()
Тогда
полные реактивные потери:
![]() где
Хт
— реактивное
сопротивление обмоток трансформатора,
определяемое напряжением короткого
замыкания Uк
и сопротивлением Rт;
Q
= Qx.x
-потери х.х.
где
Хт
— реактивное
сопротивление обмоток трансформатора,
определяемое напряжением короткого
замыкания Uк
и сопротивлением Rт;
Q
= Qx.x
-потери х.х.
По каталожным данным потери .мощности в трансформаторах можно определить иначе. Если даны потери к.з. Рм ном, соответствующие потерям в меди при номинальной нагрузке трансформатора Shom, и известна его фактическая нагрузка S, то активные потери:
![]()
где kз — коэффициент загрузки трансформатора.
Реактивные потери можно определить также (без учета Rт) по каталожным данным:
![]()
![]()
Потери электроэнергии в меди трансформатора можно также определить по его каталожным данным Рм.ном, максимальной нагрузке Sмакс и времени потерь , найденным по рис. 2.10:
![]()
Потери электроэнергии в стали определяются потерями мощности при х.х. ( Рст = Рх.х.) и временем включения трансформатора Твкл
![]()