

14. Динамическое действие токов короткого замыкания. Электродинамическая стойкость электрических аппаратов.
I. Системы проводников при протекании по ним токов испытывают электродинамические взаимодействия, сопровождающиеся значительными механическими напряжениями. При одинаковом направлении тока проводники притягиваются, а если токи направлены в противоположные стороны, то отталкиваются.
Сила
взаимодействия токов определяется по
формулам, вытекающим из закона Био-Савара.
Для двух параллельных проводников
длиной l, расположенных на расстоянии
а друг от друга, она может быть найдена
из выражения![]()
Если токи выражены в амперах, а сила F - в ньютонах, то коэффициент k равен 2107; коэффициент kф учитывает форму проводника и может быть принят равным 1 для проводников круглого сечения независимо от расстояния между ними и для проводников любой формы, если расстояние в свету между ними больше периметра поперечного сечения токоведущей части.
Сила F распределена
равномерно по длине параллельных
проводников. Удельное усилие на единицу
длины проводника для условий равно:![]()
Электродинамические взаимодействия в трехфазных установках переменного тока имеют ряд ocoбенностей. Усилия изменяются во времени по значению и направлению и имеют колебательный характер.
Сила, действующая на проводник с током, определяется как результат взаимодействия его с токами в проводниках двух других фаз, при том в наиболее тяжелых условиях оказывается проводник средней фазы. Наибольшее удельное усилие на проводник средней фазы может быть определено из выражения, Н/м,
![]()
где Im-амплитуда тока в фазе, А; а - расстояние между соседними фазами, м.
Коэффициент
![]() учитывает фазовые смещения токов в
проводниках.
учитывает фазовые смещения токов в
проводниках.
Взаимодействие проводников существенно возрастает в режиме КЗ, когда полный ток КЗ достигает своего наибольшего значения- ударного.
Для определения
удельного усилия при трехфазном КЗ в
системе проводников, пользуются
выражением при условии
![]() ,
тогда
,
тогда
![]()
где
![]() -
ударный ток трехфазного КЗ, А.
-
ударный ток трехфазного КЗ, А.
Выше рассматривались междуфазные усилия. Однако в реальных аппаратах и шинных конструкциях могут возникать довольно большие силы взаимодействия токов одной фазы. Это происходит при расщеплении фазы на ряд параллельных проводов, а также тогда, когда проводники не прямолинейны, а образуют петли, изгибаются под углом. Подобные силы имеют место в разъединителях, реакторах и других аппаратах.
Для предотвращения механических повреждении под действием усилий, возникающих в проводниках при протекании по ним токов КЗ, все элементы токоведущей конструкции должны обладать достаточной электродинамической стойкостью.
Под электродинамической стойкостью понимают обычно способность аппаратов или проводников выдерживать механические усилия, возникающие при протекании токов КЗ, без деформаций, препятствующих их дальнейшей нормальной работе.
Для
электрических аппаратов завод-изготовитель
указывает гарантийный ток КЗ, при котором
обеспечивается электродинамическая
стойкость. Чаще всего в каталогах на
оборудование задается мгновенное
значение тока электродинамической
стойкости iдин (или imax
,или iпр.скв ).При выборе
аппаратов гарантированный
заводом-изготовителем ток сравнивается
с расчетным ударным током КЗ. Должно
быть выполнено условие
![]() .
.
Электродинамическая
стойкость жестких шин, за исключением
комплектных токопроводов и шин КРУ,
определяется расчетом механических
напряжений в материале проводника при
КЗ. Критерием стойкочн служит выполнение
условия![]()
![]() ,
где
,
где
![]() и
и
![]() -
соответственно допустимое и расчетное
значения механических напряжении и
материале проводника.
-
соответственно допустимое и расчетное
значения механических напряжении и
материале проводника.
Согласно ПУЭ на электродинамическую стойкость не проверяют аппараты и проводники, защищенные предохранителями с плавкими вставками на ток до 60 A, a также аппараты и шины цепей трансформаторов напряжения при условии их расположения в отдельной камере.
Не рассчитывают механические напряжения от сил электродинамического взаимодействия в гибких проводах. Однако при ударных токах более 50 кА такие провода требуется проверять на схлестывание.
В ПУЭ оговорены также другие частные случаи, когда допустимо не проверять аппараты и проводники на электродинамическую стойкость при КЗ.
II. Известно, что системы проводников при протекании по ним токов испытывают электродинамические взаимодействия, сопровождающиеся значительными механическими напряжениями.
При одинаковом направлении тока проводники притягиваются, а если токи направлены в противоположные стороны, то отталкиваются
Р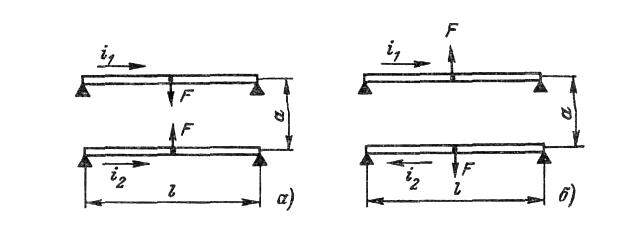 ис.
18.1. Электродинамическое взаимодействие
между двумя токоведущими частями при
согласном (а) и встречном (б) направлениях
токов.
ис.
18.1. Электродинамическое взаимодействие
между двумя токоведущими частями при
согласном (а) и встречном (б) направлениях
токов.
Сила взаимодействия токов определяется по формулам, вытекающим из закона Био-Савара. Для двух параллельных проводников длиной l, расположенных на расстоянии а друг от друга, она может быть найдена из выражения
![]() (18.1)
(18.1)
Если токи выражены в амперах, а сила F — в ньютонах, то коэффициент k равен 2∙10-7; коэффициент kф учитывает форму проводника и может быть принят равным единице для проводников круглого сечения независимо от расстояния между ними и для проводников любой формы, если расстояние в свету между ними будет больше периметра поперечного сечения токоведущей части. В противном случае коэффициент kф отличен от единицы и при вычислении усилий должен быть предварительно определен по специальным графикам.
Сила F распределена равномерно по длине параллельных проводников. Удельное усилие на единицу длины проводника для условий рис. 18.1 равно:
![]() . (18.2)
. (18.2)
Электродинамические взаимодействия в трехфазных установках переменного тока имеют ряд особенностей. На рис. 18.2 изображены векторы усилий между проводниками отдельных фаз, расположенных в одной плоскости, в различные моменты времени на протяжении одного периода переменного тока. Усилия изменяются во времени по значению и направлению и имеют колебательный характер.
Сила, действующая на проводник с током, определяется как результат взаимодействия его с токами в проводниках двух других фаз, при этом в наиболее тяжелых условиях оказывается проводник средней фазы. Наибольшее удельное усилие на проводник средней фазы может быть определено из выражения, Н/м,
![]() , (18.3)
, (18.3)
где Im — амплитуда тока в фазе, А; а — расстояние между соседними фазами, м.
Коэффициент
![]() учитывает фазовые смещения токов в
проводниках.
учитывает фазовые смещения токов в
проводниках.
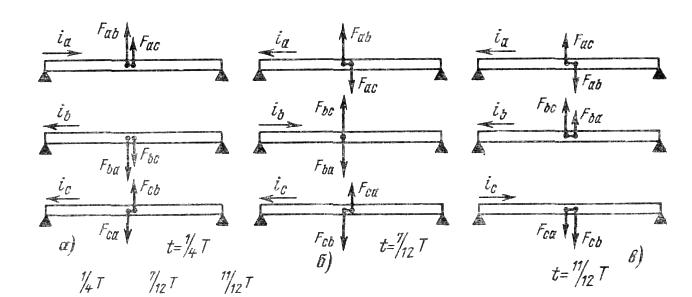
Рис. 18.2.Электродинамические взаимодействия в трехфазной системе проводников:
а-в — силы взаимодействия для разных моментов периода;
г — кривые изменения токов в фазах
Взаимодействие проводников существенно возрастает в режиме КЗ, когда полный ток КЗ, достигает своего наибольшего значения — ударного. При оценке взаимодействия фаз необходимо рассматривать двухфазное и трехфазное КЗ.
Д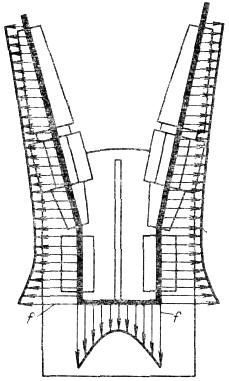 ля
определения удельного усилия при
трехфазном КЗ в системе проводников,
показанной на рис. 18.2, пользуются
выражением (18.3) при условии
ля
определения удельного усилия при
трехфазном КЗ в системе проводников,
показанной на рис. 18.2, пользуются
выражением (18.3) при условии
![]() тогда,
тогда,
![]() , (18.4)
, (18.4)
где ίy(3) — ударный ток трехфазного КЗ, А.
В случае двухфазного
КЗ влияние третьей (неповрежденной)
фазы ничтожно мало, поэтому для определения
удельного усилия используют выражение
(18.2), принимая во внимание, что
![]() .Следовательно,
.Следовательно,
![]() (18.5)
(18.5)
где ίy(2) — ударный ток двухфазного КЗ, А.
Рис. 18.3. Эпюры электродинамических взаимодействий в пределах одной фазы масляного выключателя
Учитывая, что
![]() ,
нетрудно показать, что междуфазное
усилие при трехфазном КЗ больше, чем
при двухфазном. Поэтому расчетным видом
КЗ при оценке электродинамических сил
считают трехфазное.
,
нетрудно показать, что междуфазное
усилие при трехфазном КЗ больше, чем
при двухфазном. Поэтому расчетным видом
КЗ при оценке электродинамических сил
считают трехфазное.
Выше рассматривались междуфазные усилия. Однако в реальных аппаратах и шинных конструкциях могут возникать довольно большие силы взаимодействия токов одной фазы. Это происходит при расщеплении фазы на ряд параллельных проводов, а также тогда, когда проводники не прямолинейны, а образуют петли, изгибаются под углом. На рис. 18.3 в качестве примера показана эпюра усилий, возникающих в пределах токоведущего контура фазы масляного выключателя.
Такие силы могут привести к самопроизвольному отключению выключателя, если не принять соответствующих мер. Так, например, при токе ίy = 50 кА на траверсу подвижных контактов выключателя МКП-35 действует сила, равная примерно 2000Н. Подобные силы имеют место в разъединителях, реакторах и других аппаратах.
Для предотвращения механических повреждений под действием усилий, возникающих в проводниках при протекании по ним токов КЗ, все элементы токоведущей конструкции должны обладать достаточной электродинамической стойкостью.
Под электродинамической стойкостью понимают обычно способность аппаратов или проводников выдерживать механические усилия, возникающие при протекании токов КЗ, без деформации, препятствующих их дальнейшей нормальной работе.
Для электрических аппаратов завод-изготовитель указывает гарантийный ток КЗ, при котором обеспечивается электродинамическая стойкость. Чаще всего в каталогах на оборудование задается мгновенное значение тока электро- динамической стойкости ίдин, (или ίmax, или ίпр.скв). При выборе аппаратов гарантированный заводом-изготовителем ток сравнивается с расчетным ударным током КЗ. Должно быть выполнено условие ίдин (max, пр.скв) ίy(3) .
Электродинамическая стойкость жестких шин, за исключением комплектных токопроводов и шин КРУ, определяется расчетом механических напряжений в материале проводника при КЗ. Критерием стойкости служит выполнение условия
σдоп σрасч ,
где σдоп и σрасч — соответственно допустимое и расчетное значения механических напряжений в материале проводника.
Согласно ПУЭ на электродинамическую стойкость не проверяют аппараты и проводники, защищенные предохранителями с плавкими вставками на ток до 60 А, а также аппараты и шины цепей трансформаторов напряжения при условии их расположения в отдельной камере.
Не рассчитывают механические напряжения от сил электродинамического взаимодействия в гибких проводах. Однако при ударных токах более 50 кА такие провода требуется проверять на схлестывание.
В ПУЭ оговорены также другие частные случаи, когда допустимо не проверять аппараты и проводники на электродинамическую стойкость при КЗ.