

6. Ад с улучшенными пусковыми свойствами и их использование в нефтяной промышленности
1. Двухклеточный двигатель
Чтобы сохранить простоту и надежность двигателей с короткозамкнутой обмоткой ротора, но придать им лучшие пусковые характеристики, было предложен много различных специальных типов двигателей, из которых наибольшее значение имеют: двухклеточныи двигатели и глубокопазные и их разновидности.
Идея двухклеточного двигателя, предложенная еще Доливо-Добровольским, состоит в том, что на роторе укладывают две обмотки (рис. 1, а), причем одна
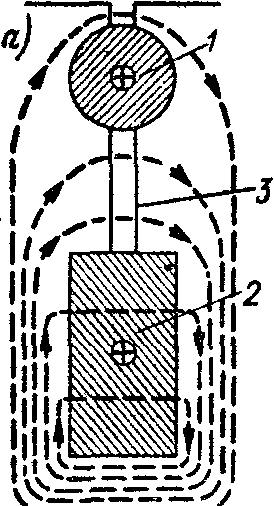
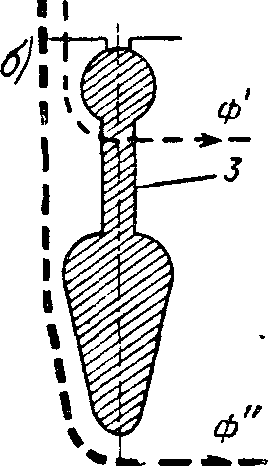
Рисунок 1—Формы пазов двухклеточного двигателя:
а — с двумя стержнями; б —с одним стержнем
из них имеет большое активное и малое индуктивное сопротивление и выполняет роль пусковой обмотки (стержень 1), тогда как другая — рабочая обмотка (стержень 2) — имеет малое активное и сравнительно большое индуктивное сопротивление. Такое соотношение между параметрами обеих обмоток ротора достигается тем, что, во-первых, пусковая обмотка делается из материала с высоким удельным сопротивлением (марганцовистая латунь, бронза и т. д.) и, во-вторых, она располагается ближе к поверхности ротора, тогда как рабочая обмотка располагается дальше от поверхности ротора и делается обычно из меди.
Стержень 1 пусковой обмотки (рис. 1, а) сцеплен только с небольшим числом линий потока рассеяния; стержень 2 рабочей обмотки сцеплен с большим числом этих линий. Таким образом, достигается малое индуктивное сопротивление наружной (пусковой) обмотки, но рабочая обмотка имеет повышенное индуктивное сопротивление.
Между верхним и нижним стержнями оставляют щель 3, которая может быть залита металлом обмоток (рис. 1, б). Наличие щели значительно уменьшает магнитную проводимость пути магнитного потока Ф’ поперек пазов и обеспечивает сцепление основного потока Ф" с нижней рабочей обмоткой.
Характеристики обеих обмоток определяют их роль во время пуска двигателя. В начальный момент пуска, когда ротор еще неподвижен, частота тока в роторе равна частоте сети, т. е. f2 =f1. Ток рабочей обмотки, вследствие ее малого активного и большого индуктивного сопротивлений, отстает почти на четверть периода от наведенной в этой обмотке Э.Д.С. Поэтому ток рабочей обмотки при пуске почти не создает вращающего момента. Ток пусковой обмотки, вследствие ее малого индуктивного и большого активного сопротивления, практически совпадает с наводимой в этой обмотке Э.Д.С. Таким образом, именно эта обмотка и создает при пуске требуемый вращающий момент.
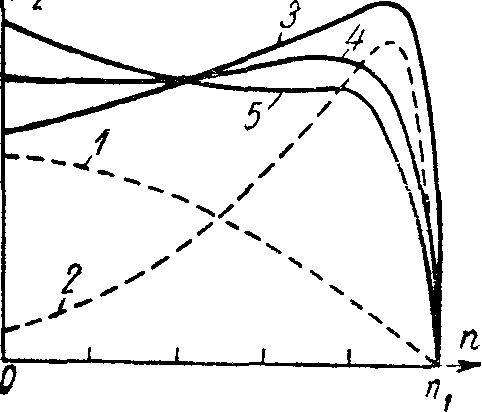
Рисунок 2—Механические характеристики двухклеточного двигателя
По мере увеличения скорости вращения ротора частота тока в нем уменьшается, соответственно чему уменьшаются индуктивные сопротивления обеих обмоток. При нормальной скорости вращения индуктивные сопротивления обмоток очень малы, и ток, распределяясь обратно пропорционально их активным сопротивлениям, почти весь идет по рабочей обмотке. Соотношение между активным и индуктивным сопротивлением пусковой обмотки выбирается таким, чтобы обеспечить необходимый пусковой момент Мп и пусковой ток Iп.
На рисунке 2 показаны механические характеристики М2=f(n) двухклеточного двигателя. Здесь 1 — линия момента, создаваемая пусковой обмоткой, 2 — то же, рабочей обмоткой, 3 — линия результирующего момента. Изменяя соотношения между параметрами пусковой и рабочей обмоток, можно получить различные формы механических характеристик, как, например, 4 и 5 на рисунке 2.
Более подробный анализ показывает, что большему начальному пусковому моменту Мп соответствует больший пусковой ток Iп и меньшая перегрузочная способность.
![]()
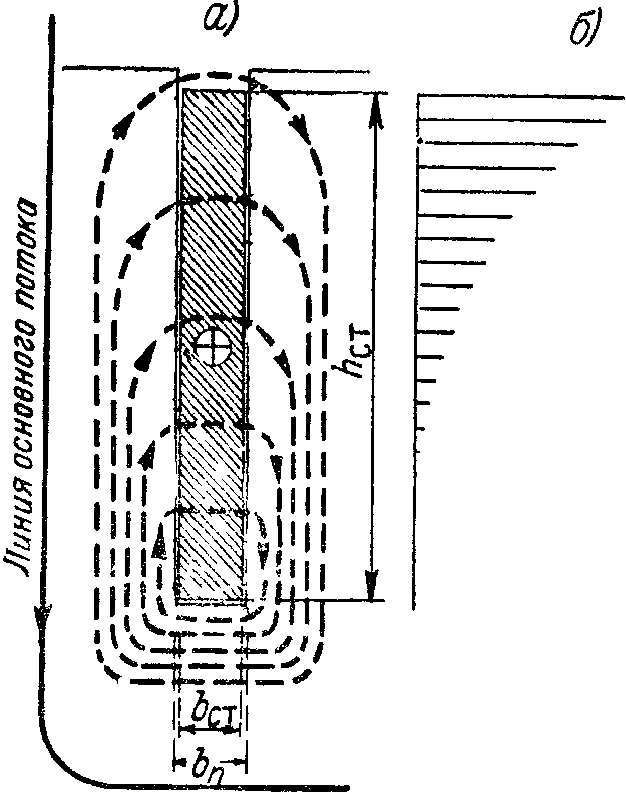
Рисунок 4—Вытеснение тока в проводнике, находящемся в пазу:
а — картина поля; б — распределение плотности тока;
в — эквивалентный проводник при вытеснении тока
К
недостаткам двухклеточного двигателя
относится несколько пониженный
![]() по
сравнению с двигателями нормального
исполнения. Это объясняется относительно
большим индуктивным сопротивлением
рассеяния рабочей обмотки.
по
сравнению с двигателями нормального
исполнения. Это объясняется относительно
большим индуктивным сопротивлением
рассеяния рабочей обмотки.