


Министерство образования и науки Российской Федерации
КАЗАНСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
имени А. Н. ТУПОЛЕВА
______________________________________________________________________________________________
Кафедра Основы Конструирования
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине
«Теория Механизмов и Машин»
(Номер задания 102)
Выполнил: Студент гр.1235
Шипигин С.В.
Проверил: Профессор Яруллин М.Г.
Казань 2013
Оглавление
Исследование шарнирно-рычажного шестизвенного механизма...........................................................................................................................................................................................с.3
Исходные данные........................................................................................................................................................с.3
Построение кинематической схемы и структурный анализ механизма..........................................................................................................................................................................с.4
Определение скоростей.....................................................................................................................................с.5
Определение ускорений......................................................................................................................................с.6
Построение графиков......................................................................................................................................с.6
Силовой анализ механизма……………………………………………………………………………………………….c.7
Определение давлений в шарнирах…………………………………………………………………c.7
Определение момента, приложенного к кривошипу……………………………….c.7
Определение момента, приложенного к кривошипу методом рычага Жуковского………………………………………………………………………………………………………………..c.8
Расчет относительной погрешности………………………………………………………….c.8
Исследование эвольвентного зацепления
Исходные данные…………………………………………………………………………………………………………………c.9
Определение геометрических параметров зубчатого колеса……………………c.9
Определение геометрических параметров зубчатого зацепления…..……..c.10
Определение качественных характеристик зубчатого зацепления……….c.11
1. Исследование шарнирно-рычажного шестизвенного механизма
1.1 Исходные данные:
LOA=0.25m; LAB=1.0m; LAC=0.25m; LAB=0.9m; LCD=0.9m
w1=40 рад/с
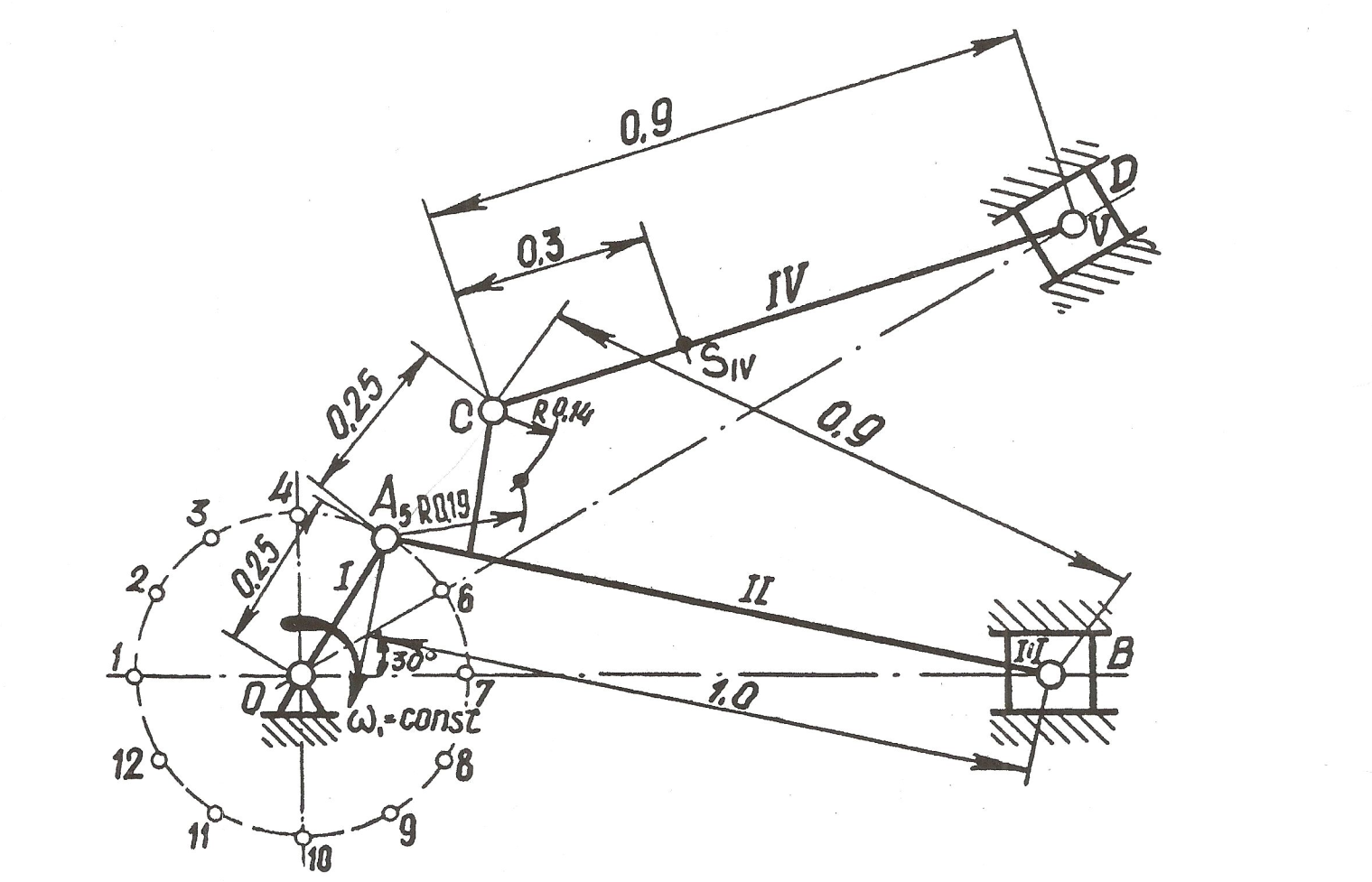
1.2 Построение кинематической схемы и структурный анализ механизма:
Структурный анализ механизма:
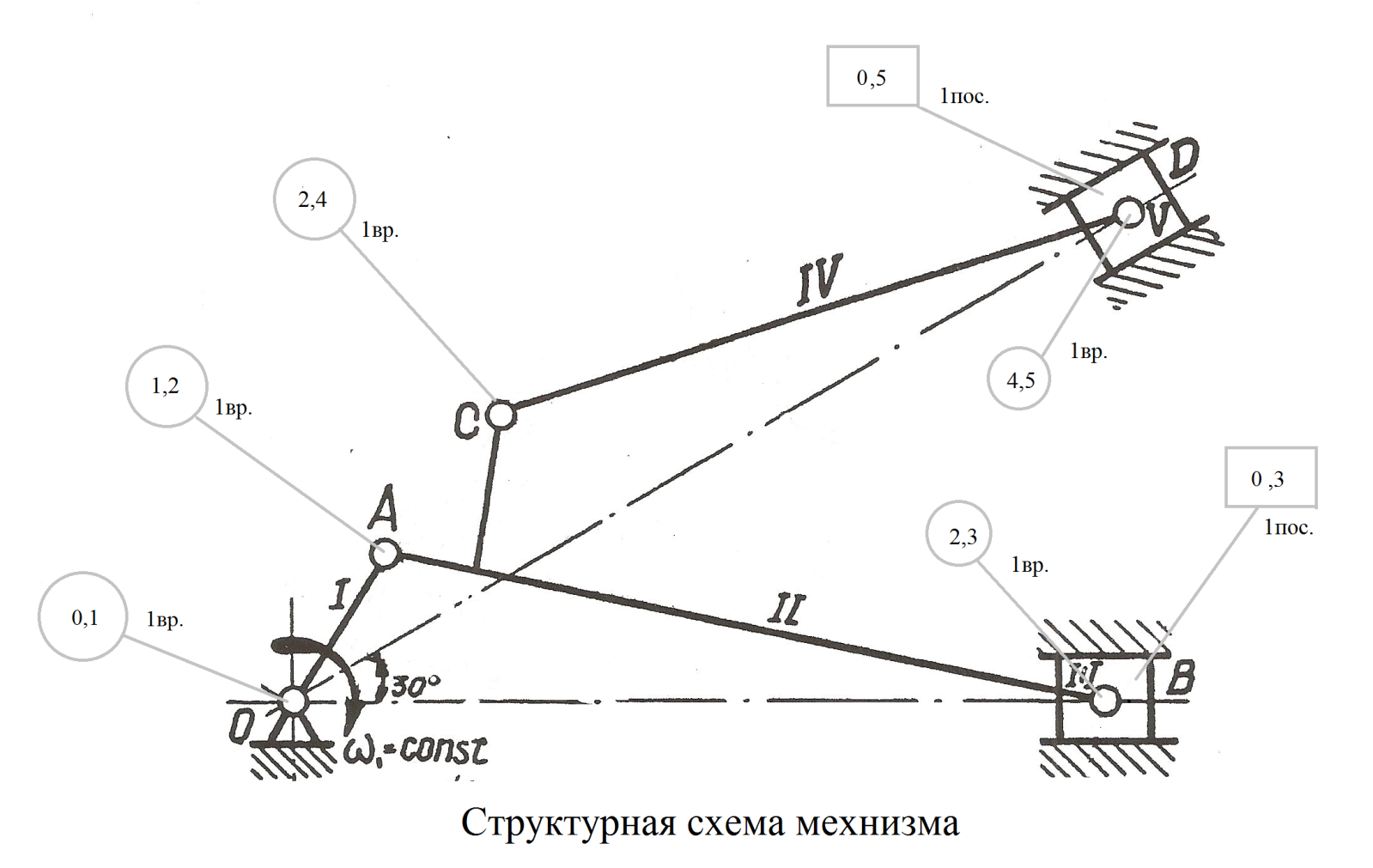
m=6; p1=7; p2=0; p3=0; p4=0; p5=0; q=0
Определение степени подвижности механизма (DOF):
W=3*(m-1)-2*p1-1*p2+q=3*(6-1)-2*7=1
1.3 Определение скоростей:
На примере 12ого положения:
VA=w1*LOA (m/s)
Kv=VA/oa=10/70=1/7 (m/(s*mm))
VB=VA+VBA
VBllOB; VBA┴BA
VB=ob*Kv (m/s)
VBA=ab*Kv (m/s)
VD=VC+VDC
VDllOD; VDC┴DC
VD=od*Kv (m/s)
VDC=cd*Kv (m/s)
w2=VBA/LAB; w4=VDC/LCD
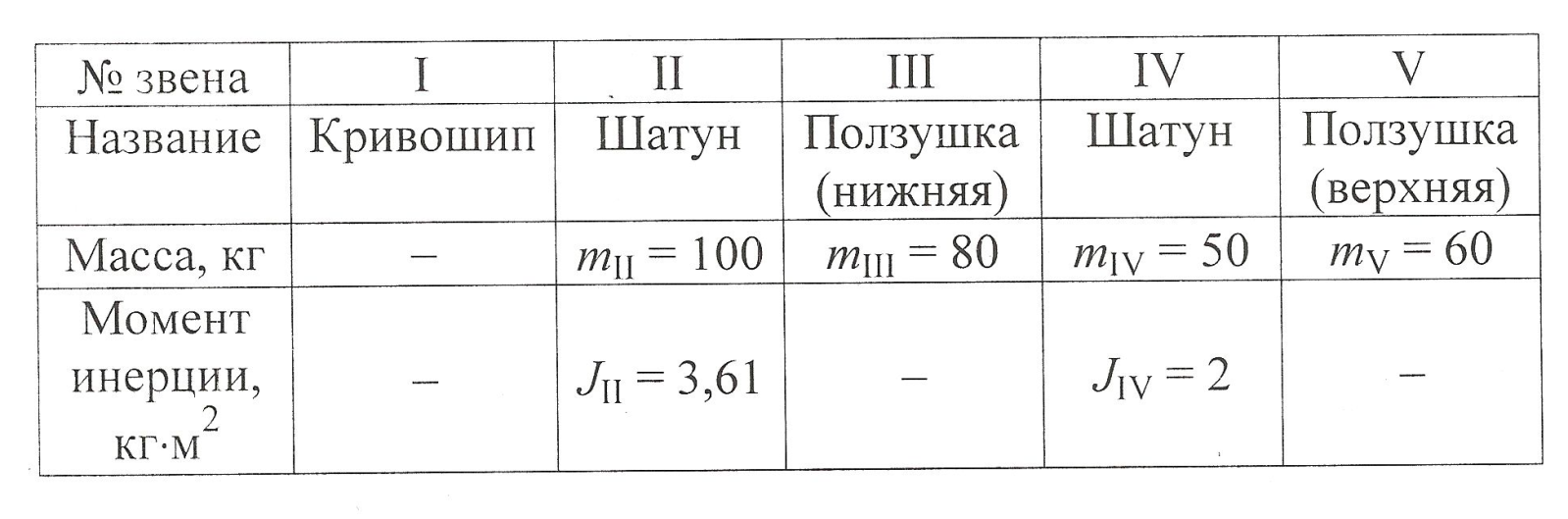
Таблица 1:
Результаты расчетов скоростей
№ |
VA |
VB |
VC |
VD |
VBA |
VDC |
VS2 |
VS4 |
w1 |
w2 |
w4 |
1 |
10 |
0 |
9 |
4,286 |
10 |
6,571 |
8,571 |
2,19 |
40 |
10 |
7.3 |
2 |
10 |
3,714 |
9,571 |
8,143 |
8,571 |
3,286 |
9 |
1,095 |
40 |
8,571 |
3.65 |
3 |
10 |
7,571 |
10,286 |
11 |
5,143 |
1,429 |
10,429 |
0,476 |
40 |
5,143 |
1.59 |
4 |
10 |
10 |
10 |
10,143 |
0 |
5,286 |
10 |
1,762 |
40 |
0 |
5.87 |
5 |
10 |
9,714 |
8,429 |
5,571 |
5,143 |
7,429 |
9,143 |
2,476 |
40 |
5,143 |
8.25 |
6 |
10 |
6,429 |
8,429 |
0 |
8,857 |
8,429 |
9,571 |
2,810 |
40 |
8,857 |
9.37 |
7 |
10 |
0 |
10 |
5,571 |
10 |
8,429 |
0 |
2,810 |
40 |
10 |
9.37 |
8 |
10 |
6,429 |
10,714 |
10,143 |
8,571 |
3,286 |
9,857 |
1,095 |
40 |
8,571 |
3.65 |
9 |
10 |
9,857 |
11,286 |
11 |
5,286 |
1,143 |
0 |
0,381 |
40 |
5,286 |
1.27 |
10 |
10 |
10 |
10 |
8,143 |
0 |
5,143 |
10 |
1,714 |
40 |
0 |
5.714 |
11 |
10 |
7,571 |
8,857 |
4,429 |
5,143 |
8 |
10 |
2,667 |
40 |
5,143 |
8.89 |
12 |
10 |
4 |
8,286 |
0 |
8,571 |
8,286 |
9,571 |
2,762 |
40 |
8,571 |
9.21 |
|
м/с |
м/с |
м/с |
м/с |
м/с |
м/с |
м/с |
м/с |
с-1 |
с-1 |
с-1 |
|
|||||||||||
1.4 Определение ускорений:
На примере 12ого положения:
aA=aAn=w12*LOA
ka=4.082
za=aA/ka=100 (mm)
aBAn=VBA2/LBA=8.5712/1=73.462 (m/s2)
zBAn= aBAn/ ka=17.918 (mm)
aBA= zba* ka=52*4.1=213.2 (m/s2)
aC=aA+aCA; aC=aB+aCB
aCA/aBA=LCA/LBA; aCB/aBA=LCB/LBA
aCA= aBA* LCA/ LBA=213.2*0.25/1=53.3 (m/s2)
aCB= aBA* LCB/ LBA=213.2*0.9/1=191.88 (m/s2)
aB=zb* ka=303.4 (m/s2)
zСA=53.3/4.1=13 (mm)
zСВ=191.88/4.1=46.8 (mm)
aDCn=VDC2/LDC=8.2862/0.9=76.286 (m/s2); zDCn=18.606 (mm)
ac=zc*ka=438.7 (m/s2); aD=369 (m/s2); aDC=86.1 (m/s2)
aDCז=45.1 (m/s2); aBAז=192.7 (m/s2);
Е2= aBAז/LBA=192.7 (s-2); Е4= aDCז/LDC=50.111 (s-2)
Таблица 2:
Результаты расчетов скоростей
№ |
aA |
aB |
aC |
aD |
aBA |
aDC |
aS2 |
aS4 |
Е1 |
Е2 |
Е4 |
10 |
400 |
0 |
364,9 |
229,6 |
400 |
262,4 |
402 |
303,4 |
0 |
400 |
287 |
12 |
400 |
303.4 |
438.7 |
369 |
213.2 |
86.1 |
426 |
410 |
0 |
205 |
55 |
|
м/с2 |
м/с2 |
м/с2 |
м/с2 |
м/с2 |
м/с2 |
м/с2 |
м/с2 |
с-2 |
с-2 |
с-2 |