

35. Среда программирования mplab. Программа сравнения двух чисел. Алгоритм и программа поиска наибольшего числа. Алгоритм и программа поиска наименьшего числа.
Для сравнения двух чисел используются следующие программы:
BTFSC - Проверить бит b в регистре f, пропустить, если 0
Синтаксис: [label] BTFSC f,b Операция: пропустить, если (f<b>) = 0
Описание: Если бит b в регистре f равен '1' , то исполняется следующая инструкция.
Если бит b в регистре f равен 0 , то следующая инструкция не выполняется.
BTFSS - Проверить бит b в регистре f, пропустить если (f<b>) = 1
Синтаксис: [labef] BTFSS f,b Операция: Если бит b в регистре f равен ‘0’,
то следующая инструкция не выполняется.
Алгоритм и программа поиска наибольшего числа.
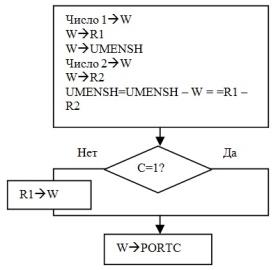
MOVLW B’Число 1’ ; Число 1 W
MOVWF R1 ; W R1
MOVWF UMENSH ; W UMENSH
MOVLW B’Число 2’ ; Число 2 W
MOVWF R2 ; W R2
SUBWF UMENSH,1 ; UMENSH= UMENSH – W=
= R1 – R2
BTFSS STATUS,C ; C = 1?
MOVF R1,0 ; R1 W
MOVWF PORTC ; W PORTC
36. Среда программирования mplab. Команды, используемые для программ разветвленной структуры btfsc, btfss, goto. Описание работы, используемые параметры. Использование флагов регистра status.
BTFSC Пропуск следующей команды если бит сброшен, Синтаксис:[label] BTFSC f,b. Операция: Пропуск если f=0 Описание: В случае если бит b в регистре f равен 0 вместо следующей по списку команды выполняется пустая операция (NOP) растягивая выполнение данной команды на 2 цикла. Значение бита доступа к памяти a обрабатывается стандартным образом (по умолчанию a=1)Пример
HERE BTFSC FLAG,1
FALSE :
TRUE :
Перед выполнением:PC = адрес(HERE)
После выполнения:если FLAG<1>=0, PC = адрес TRUE если FLAG<1>=1, PC = адрес FALSE
BTFSS - пропустить команду, если бит равен единице. Синтаксис: BTFSS f, b. Операция: Пропустить, если f(b) = 1. Описание: Если бит b регистра f равен 0, выполняется следующая команда. Если бит b регистра f равен 1, следующая команда, считанная в текущем командном цикле, игнорируется, и вместо нее в следующем цикле выполняется NOP, в результате команда выполняется за два цикла. Пример:
MOVLW B’Число 1’ ; Число 1 W
MOVWF R1 ; W R1
MOVWF UMENSH ; W UMENSH
MOVLW B’Число 2’ ; Число 2 W
MOVWF R2 ; W R2
SUBWF UMENSH,1 ; UMENSH=UMENSH – W = R1 – R2
BTFSS STATUS,C ; C = 1?
MOVF R1,0 ; R1 W
MOVWF PORTC ; W PORTC
GOTO метка. Параметр "метка" задает строку командного файла, на которую должна перейти MS-DOS. Метка не может включать в себя разделители (пробелы, точки с запятой или знаки равенства). GOTO использует первые 8 символов каждой метки. LOOP ; Метка.
CLRF PORTС ; Очистить порт С.
MOVLW B’11111111’ ; Записать в W двоичное число.
MOVWF PORTС ; Записать в порт С восемь единиц.
MOVLW B’00111100’ ; Записать в W двоичное число.
MOVWF PORTС ; Записать его в порт С.
GOTO LOOP ; Вернуться на метку LOOP. END
37. Среда программирования MPLAB. Программа сложения и вычитания трех и более операндов. Описательная, установочная и исполнительная части программы. Назначение команд и используемые параметры. Алгоритмы для сложения и вычитания двух и более операндов в среде MPLAB.