

1.Понятие входных и выходных и возмущающих воздействий. Цель управления.
Входное воздействие-воздействие, приложенное к входу системы управления или отдельно рассматриваемого ее элемента (подсистемы).
Выходное воздействие (Y) – воздействие, выдаваемое на выходе системы управления или устройства регулирования.
Задающее воздействие– воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
В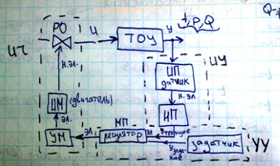 озмущающее
воздействие
(Z) – воздействие, стремящееся нарушить
функциональную
связь между
задающим воздействием и регулируемой
величиной. Например влияние внешней
среды ,ее температуру ,изменение
нагрузки.
озмущающее
воздействие
(Z) – воздействие, стремящееся нарушить
функциональную
связь между
задающим воздействием и регулируемой
величиной. Например влияние внешней
среды ,ее температуру ,изменение
нагрузки.
В результате действия возмущающих воздействий происходит отклонение выходных параметров от требуемых значений
Цель управления- поддержание выходных параметров в определенном диапазоне допустимых значений.
Задача управления- ликвидация отклонений выходных параметров от требуемых значений с помощью средств автоматики и выработки соответствующих управляющих воздействий.
2.Средства автоматизации. Технологический объект управления. Три задачи управления технологическим процессом.
Технологический объект управления- это совокупность технологического оборудования и реализованного на нем технологического процесса. Под технологическим объектом управления в теплоэнергетике понимают различные технологические процессы связанные с получением тепла и энергии.
Примеры технологических процессов- процессы горения и парообразования в котлоагрегате, процесс вспрыска питательной воды в водопаровой тракт котлоагрегата, процесс подачи топлива в топку котла.
Общая задача управления- поддержание требуемого значения выходного параметра можно разделить на следующие задачи:
измерение выходных параметров определяющих ход технологического процесса
выработка управляющих воздействий компенсирующих отклонение выходных параметров от требуемых значений
подача сигналов управления на исполнительные органы осуществляющие непосредственное воздействие на ход технологического процесса
3. . Структурная схема автоматизированной системы управления технологическим процессом и состав технических средств автоматики. Основные термины - измерительный прибор, нормирующий преобразователь, регулятор, исполнительный механизм, регулирующий орган, задатчик.
ИзмерПриб(датчик)- служит для измерения вых параметра ТОУ, определяющего его состояние. НормирПреобр- преобразует информацию полученную с датчика в вид необходимый для дальнейшего использования. Регулятор - это управляющее устройство, предназначенное для выработки спец воздействий, необходимых для регулирования вых параметров ТОУ и подержания их в диапазоне требуемых значений. Усилит мощн- устройство необходимое для усиления вых сигнала с регулятора до уровня, требуемого для работы ИсполнМех. ИМ – это устройство (двигатель) приводящий в работу РегулирОрган в зависимости от сигнала выработанного регулятором. РегулирОрг - с помощью перемещении которого производится регулирование состояния ТОУ. Задатчик – устройство в котором задаются необходимые (требуемые) значения выходных параметров ТОУ