

1.2. Определение класса механизма
Выполним замену кинематических пар 4 класса путём введения заменяющих звеньев, которые образуют кинематические пары 5 класса. Схема заменяющего механизма представлена на рисунке 2.
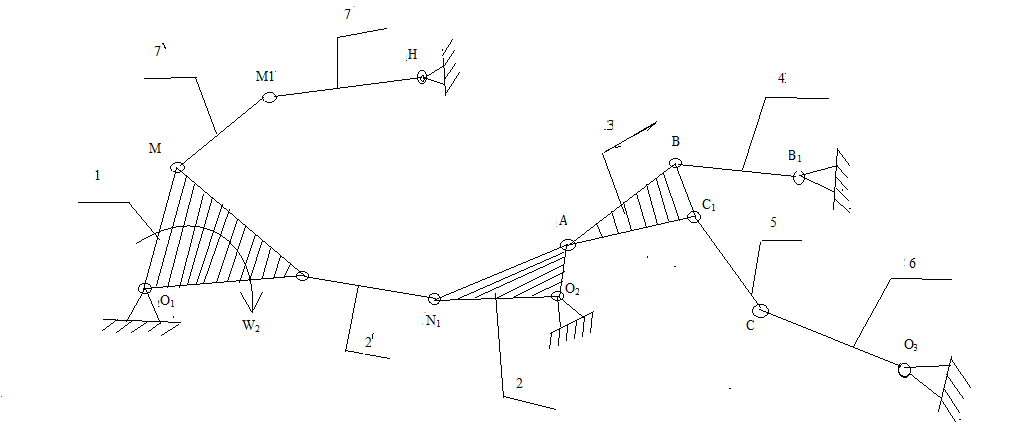


Рисунок 2 – схема заменяющего механизма.
Выполним проверку произведённой замены.
![]()
Следовательно, замена выполнена верно.
Выделяем из состава механизма 1 класса.

















W2
Оставшуюся ведомую цепь разбиваем на структурные группы. Разбивку проводим по сложным звеньям или сложным шарнирам. Эскизы структурных групп представлены на рисунке 3.
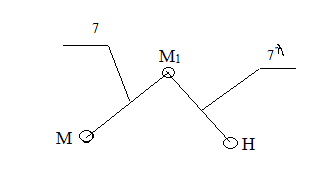
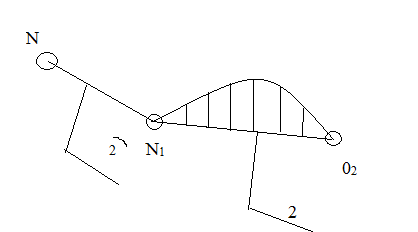
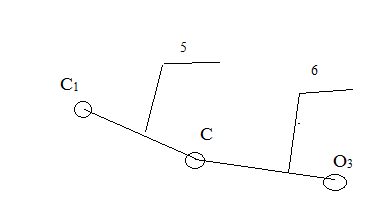
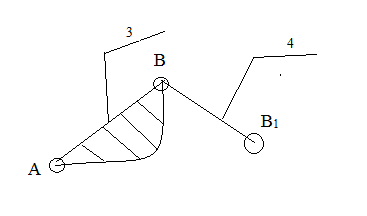
Рисунок 3 – эскизы структурных групп.
Так как в состав механизма кроме начального (механизма I класса) входят структурные группы только II класса, то весь механизм в целом относится к механизму II класса. Следовательно, при дальнейшем исследовании будем использовать методы, соответствующие данному классу механизмов.
Формула строения механизма
Гр. II кл.(7;7).

 Механизм
II
кл. = механизм I кл.
Механизм
II
кл. = механизм I кл.
 Гр II
кл.(2;2)
Гр II
кл.(2;2)

 Гр.II
кл.(3;4) гр. II
кл. (5;6).
Гр.II
кл.(3;4) гр. II
кл. (5;6).
2. Кинематический анализ
Целью кинематического анализа является определение перемещений, скоростей и ускорений звеньев механизма и отдельных его точек без учёта сил. При этом задана схема и закон движения звеньев механизма. Кинематический анализ проводим для ведомой части механизма (звенья 2-6).
2.1. Совмещённый план положений (спп)
Выполним построение СПП для шести положений звеньев механизма. Нумерацию положений выполним с одного из крайних.
Масштаб СПП определим по формуле:
![]() , где
, где
LO![]() A
= 0.3 м
A
= 0.3 м
- действительная длина кривошипа;
![]() - отрезок, изображающий кривошип на
чертеже.
- отрезок, изображающий кривошип на
чертеже.
Подставляя известные значения, получим:
µ
l=![]() = 0.002 м/мм.
.
= 0.002 м/мм.
.
Размеры остальных звеньев и отрезков на чертеже будут равны:
O2A=![]() =30мм
=30мм
AB=![]() =180
мм
=180
мм
BC=![]() =50
мм
=50
мм
O3D=![]() =60
=60
O3C=![]() =100мм
=100мм
e=![]() =2.5
мм
=2.5
мм
x=![]() =127.5мм
=127.5мм
y=![]() =97.5мм
=97.5мм
Используя
построенный СПП выполним построение
графика пути точки B
как функцию ![]() .
Масштаб графика пути по оси ординат
принимаем
.
Масштаб графика пути по оси ординат
принимаем ![]() . Масштаб графика по оси абсцисс, то
есть угла поворота кривошипа, определяется
как:
. Масштаб графика по оси абсцисс, то
есть угла поворота кривошипа, определяется
как:
µφ=![]() , где
, где
X0-12=120мм - произвольно принятый отрезок по оси Х.
Тогда
. µφ=
=![]() =0.052
рад/мм.
=0.052
рад/мм.
µt=![]() ,где ϖ-угловая скорость вращения ведущего
звена. В данном случае ϖ2.Из
формулы передаточного отношения U1-2=
n1/n2.
,где ϖ-угловая скорость вращения ведущего
звена. В данном случае ϖ2.Из
формулы передаточного отношения U1-2=
n1/n2.
Найдем частоту вращения звена 2.
n2
=![]() =
=![]() =360
об/мин.
=360
об/мин.
Из
зависимости ϖ2=![]() найдем ϖ2.
найдем ϖ2.
ϖ2=![]() =37.68
с-1,
=37.68
с-1,
µt=![]() =0.001
c/мм.
=0.001
c/мм.
µs=0.004 м/мм.
Графически дифференцируя диаграмму перемещений, строим диаграмму скоростей точки B. Масштаб диаграммы скоростей равен:
µv=![]() =
=![]() = 0.16м/c·мм,
где
= 0.16м/c·мм,
где
Аналогично, графически дифференцируем диаграмму скоростей для построения диаграммы ускорений. Масштаб диаграммы ускорений равен:
, где ![]() – произвольно выбранное полюсное
расстояние.
– произвольно выбранное полюсное
расстояние.
µа=![]() =
=
![]() =16м/c2·мм
=16м/c2·мм