

4. Основні моделі та алгоритми реалізації атракторів
4.1. Відновлення Атрактора з тимчасового ряду
Н![]() ехай
є часовий ряд експериментальних даних,
що представляє собою відліки деякої
фізичної величини:
ехай
є часовий ряд експериментальних даних,
що представляє собою відліки деякої
фізичної величини:![]() .
Якщо відомий крок за часом
.
Якщо відомий крок за часом
![]() ,
то время t=k*
. Передбачається,
що фізична величина s
є однією з змінних динамічної системи.
Система
знаходиться в стаціонарному режимі,
тобто фазова траєкторія проходить
всередині Атрактора. Для відновлення
атрактора Такенса запропоновано метод
тимчасової затримки координат. У
n-вимірному фазовому просторі будується
послідовність точок види:
,
то время t=k*
. Передбачається,
що фізична величина s
є однією з змінних динамічної системи.
Система
знаходиться в стаціонарному режимі,
тобто фазова траєкторія проходить
всередині Атрактора. Для відновлення
атрактора Такенса запропоновано метод
тимчасової затримки координат. У
n-вимірному фазовому просторі будується
послідовність точок види:
![]()
![]()
О![]() сновний
результат Такенса полягає в наступному.
Якщо
сновний
результат Такенса полягає в наступному.
Якщо![]() ,
,
то безліч точок задає вкладення вихідного атрактора майже при будь-якому виборі спостерігається змінної, якщо n не менш подвоєною розмірності вихідного атрактора. Для оцінки характеристик реального досліджуваного Атрактора можна обчислювати характеристики відновленого Атрактора. З метою зменшення помилки, зумовленої конечністю набору експериментальних точок
, необхідно проводити розрахунки за кількох різних значеннях M і n і домагатися незалежності одержуваних оцінок характеристик від M і n в межах заданої точності.
4 .2. Вибір тимчасової затримки
Д ля малих кроків за часом значення s i s+1 будуть близькими, тому велике значення набуває правильний вибір тимчасової затримки . Традиционный способ выбора временной задержки состоит в вычислении автокорреляционной функции временного ряда:
Затримка вибирається рівна часу першого перетину нуля автокореляційної функції. Другий спосіб вимагає обчислення спектру потужності тимчасового ряду, тобто швидкого перетворення Фур'є автокореляційної функції. Якщо в спектрі потужності присутні кратні піки, то затримка вибирається рівної чверті періоду найвищою з домінуючих частот. Третій спосіб заснований на обчисленні середньої взаємної інформації між двома вимірами. Нехай дано дві множини вимірювань A і B. Взаємна інформація між елементом ai безлічі A і елементом bj множини B визначається як кількість інформації, яку мають вимірювання ai і bj по відношенню до один одного:
Якщо вимірювання незалежні, то взаємна інформація дорівнює нулю. Усереднюючи по всіх вимірах, отримуємо:
4.3. Алгоритм обчислення кореляційної розмірності атрактора
У
разі модельних даних, коли нам відома
розмірність n фазового простору динамічної
системи і всі n координат кожної точки
на Атракторі, кореляційна розмірність
D2 Атрактора знаходять наступним чином: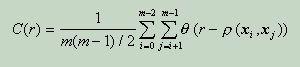
У разі експериментальних даних ми зазвичай не знаємо розмірність фазового простору системи і володіємо інформацією тільки про одну координаті точок на Атракторе. Тому всі розрахунки проводяться для декількох розмірностей фазового простору n = 1,2,3, ... Для відновлення атрактора використовується метод Такенса. При цьому кореляційний розмірність Атрактора D2 (n) спочатку зростає, але потім зазвичай виходить на постійний рівень. Таким чином, отримують шукану кореляційну розмірність D Атрактора і оцінку розмірності фазового простору системи. Якщо ж вихідний сигнал динамічної системи сильно зашумлен, то розмірність Атрактора постійно зростає.
4.4. Алгоритм обчислення кореляційної ентропії Атрактора
К![]() ореляційна
ентропія K може бути обчислена досить
просто. Для цього також обчислюють
кореляційний інтеграл, але розглядають
не тільки його залежність від відстані
r, а й від розмірності фазового простору
n. При цьому вважають, що
ореляційна
ентропія K може бути обчислена досить
просто. Для цього також обчислюють
кореляційний інтеграл, але розглядають
не тільки його залежність від відстані
r, а й від розмірності фазового простору
n. При цьому вважають, що