

Общие сведения о шаговых двигателях
В современных системах управления широко используются устройства, оперирующие с цифровой формой сигнала. Цифровая форма представления сигнала привела к созданию нового типа двигателей – шаговых двигателей (ШД).
Шаговые двигатели – это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Современные ШД являются, по сути, синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным, а частотным пуском ШД. Роторы могут быть возбужденными (активными) и невозбужденными (пассивными).
Рассмотрим принцип действия простейшего однофазного шагового двигателя.
Д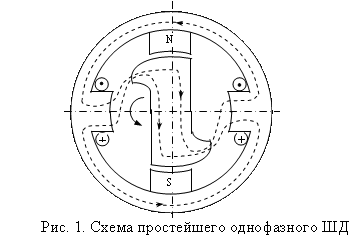 вухполюсный
ротор из магнитомягкой стали с
клювообразными выступами помещен в
четырехполюсный статор (рис.1). Одна пара
полюсов выполнена из постоянных магнитов,
на другой – находится обмотка управления.
вухполюсный
ротор из магнитомягкой стали с
клювообразными выступами помещен в
четырехполюсный статор (рис.1). Одна пара
полюсов выполнена из постоянных магнитов,
на другой – находится обмотка управления.
Пока тока в обмотках управления нет, ротор ориентируется вдоль постоянных магнитов и удерживается около них с определенным усилием, которое определяется магнитным потоком полюсов Фпм.
При подаче постоянного напряжения на обмотку управления возникает магнитный поток Фу примерно вдвое больший, чем поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, развиваемый постоянными магнитами, стремясь занять положение соосное с полюсами управляющей обмотки. Поворот происходит в сторону клювообразных выступов, т.к. магнитное сопротивление между статором и ротором в этом направлении меньше, чем в обратном.
Следующий управляющий импульс отключает напряжение с обмотки управления и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов.
Достоинством однофазных ШД с постоянными магнитами является простота конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке управления не требуется потребление энергии, угол поворота сохраняет свое значение и при перерывах в питании. Двигатели этого типа отрабатывают импульсы с частотой до 200-300 Гц. Их недостатки – низкий КПД и невозможность реверса.
Режимы работы и характеристики
В зависимости от частоты подачи импульсов управления различают следующие режимы работы ШД: статический, квазистатический, установившийся и переходные.
Статический режим соответствует протеканию по одной из фазных обмоток постоянного тока, создающего неподвижное магнитное поле и характеризуется статическим синхронизирующим моментом, который в первом приближении можно считать синусоидальным.
Квазистатический режим (режим отработки единичных шагов) характеризуется тем, что переходный процесс (обычно колебательный), к началу следующего шага заканчивается, т. е. угловая скорость ротора в начале каждого следующего шага равна нулю. Он используется в различных стартстопных, лентопротяжных и других механизмах, где требуется фиксация ротора после каждого шага.
Установившийся режим работы ШД соответствует постоянной частоте управляющих импульсов.
Переходные режимы имеют место при пуске, торможении и реверсе ШД.
Обычно пуску
ШД соответствует скачкообразное
изменение частоты импульсов от нуля до
рабочей. Переходный процесс, как правило,
идет с перерегулированием по скорости.
Максимальную частоту управляющих
импульсов, при которой возможен пуск
ШД без потери шага, называют частотой
приемистости
![]() .
Частота
растет с увеличением синхронизирующего
момента, уменьшением углового шага,
снижением постоянной времени обмоток
и нагрузки.
.
Частота
растет с увеличением синхронизирующего
момента, уменьшением углового шага,
снижением постоянной времени обмоток
и нагрузки.
Торможение ротора осуществляют скачкоообразным снижением частоты управляющих импульсов до нуля. Предельная частота управляющих импульсов, при которой торможение осуществляется без выбега, как правило, выше .
Реверс ШД
производят путем изменения последовательности
коммутации токов в фазах, т.е. изменением
направления вращения поля статора.
Предельная частота следования импульсов,
при которой возможен реверс без потери
синхронизма всегда ниже
![]() .
.
Силовые схемы шагового электропривода
На рисунке приведена силовая схема питания фаз ШД при однополярном управлении и параллельном включении фаз с транзисторными ключами.
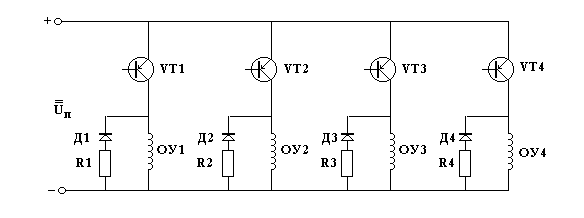
Другая схема
представляет тиристорный коммутатор
с искусственной коммутацией. Здесь
тиристоры Т1-Т4 обеспечивают парную
коммутацию обмоток ШД ОУ1-ОУ4 при которой
в каждый момент включены 2 фазы из 4.
Тиристоры Т1-Т3, а также Т2-Т4 образуют
схемы двух триггеров, в которых
переключение тиристоров происходит с
помощью колебательных контуров
![]() .
Пусть тиристор Т1 открыт и запитана
обмотка ОУ1. Конденсатор
.
Пусть тиристор Т1 открыт и запитана
обмотка ОУ1. Конденсатор
![]() заряжен до напряжения питания с плюсом
на правой обкладке. Когда поступит
управляющий импульс на Т3, он откроется
и по обмотке ОУ3 потечет ток. В то же
время по цепи
заряжен до напряжения питания с плюсом
на правой обкладке. Когда поступит
управляющий импульс на Т3, он откроется
и по обмотке ОУ3 потечет ток. В то же
время по цепи
![]() происходит быстрый перезаряд конденсатора
и при смене знака тока через тиристор
Т1 последний закроется.
происходит быстрый перезаряд конденсатора
и при смене знака тока через тиристор
Т1 последний закроется.
Вопрос №9. Цифровые системы управления электроприводами. Структурная схема цифровой системы управления. Частотные преобразователи.
Особенность цифровых систем управления является наличие: микроконтроллера; квантователя сигналов по уровню в цепях обратных связей, в цепях параллельной коррекции и в ряде случаев в устройстве задающего сигнала; квантователя по времени (такт То=0,001-0,01 с ).
Погрешность цифровых устройств не превышает величины единичного значения младшего разряда кода, с которым эти устройства оперируют. Кроме квантования по уровню цифровым системам присуще квантование по времени. Период (такт) временного квантования То для большинства систем лежит в пределах 0,001-0,01 с. Очевидно, что если поставлена задача обеспечения высокого качества управления, такт квантования следует выбирать как можно меньшим. При выборе такта квантования следует учитывать следующие факторы: требуемое качество управления; динамику объекта управления; спектры возмущений; тип электропривода; измерительные устройства. Как правило, требования оказываются противоречивыми и такт квантования выбирают из компромиссного решения.
Преимущество цифровых регуляторов заключается в реализации любой требуемой передаточной функции, возможности введения адаптации, нелинейной коррекции.
Обобщенная функциональная схема цифровой системы регулирования представлена на рис. 28.1. На рис. 28.1 обозначено: 1 - задающий квантователь; 2 - квантователь обратной связи; 3 - дискретная передаточная функция цифрового регулятора; 4 - звено с чистым запаздыванием, отражающее конечное время вычислений в регуляторе; 5 - непрерывная передаточная функция объекта управления; 6 - квантователь цепи параллельной коррекции.

Передаточная функция корректирующего дискретного регулятора в общем виде записывается следующим образом
![]()
Значения коэффициентов находят из выражения
![]()
где Wo (z) - дискретная передаточная функция объекта управления, полученная с помощью таблиц z - преобразования, Ф(z) - желаемая дискретная передаточная функция системы в замкнутом состоянии.
Функция Ф(z) должна быть реализуема. Для этого она должна представлять собой отношение двух полиномов относительно z-1 с действительными коэффициентами, причем свободный член в знаменателе должен быть отличным от нуля, а модуль степени полинома числителя должен быть больше, чем у знаменателя. При применении микропроцессоров стоимости цифровых и аналоговых систем управления практически не отличаются.
Частотный преобразователь
Частотный преобразователь служит для плавного регулирования скорости асинхронного электродвигателя за счет создания на выходе преобразователя электрического напряжения заданной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление. Частотный преобразователь – это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора (преобразователя) (иногда с ШИМ), преобразующего постоянный ток в переменный требуемых частоты и амплитуды. Выходные тиристоры (GTO) или транзисторы (IGBT) обеспечивают необходимый ток для питания электродвигателя. Для улучшения формы выходного напряжения между преобразователем и двигателем иногда ставят дроссель, а для уменьшения электромагнитных помех – EMC-фильтр.
Устройство и принцип его действия
Преобразователь частоты состоит из электрического привода и управляющей части. Электрический привод частотного преобразователя состоит из схем, в состав которых входит тиристор или транзистор, которые работают в режиме электронных ключей. В основе управляющей части находится микропроцессор, который обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
В зависимости от структуры и принципа работы электрического привода выделяют два класса преобразователей частоты: с непосредственной связью; с явно выраженным промежуточным звеном постоянного тока. Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
В преобразователях с непосредственной связью электрический привод представляет собой управляемый выпрямитель. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети. Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. Частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие - малый диапазон управления частотой вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование незапираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя. «Резаная» синусоида на выходе преобразователя с непосредственной связью является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению КПД системы в целом.
Наиболее широкое применение в современных частотно регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока. В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению КПД и к некоторому ухудшению массо-габаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используют автономный инвертор, который формирует электрическое напряжение заданной формы на обмотках электродвигателя (как правило, методом широтно-импульсной модуляции). В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия. Они имеют более высокий КПД (до 98 %) по отношению к преобразователям на IGBT транзисторах.
Преобразователи частоты являются нелинейной нагрузкой, создающей токи высших гармоник в питающей сети, что приводит к ухудшению качества электроэнергии.