

4) Вращающиеся трансформаторы
Вращающиеся трансформаторы применяют в аналого-цифровых преобразователях типа "угол-фаза-код", в системах дистанционной передачи угла повышенной точности, в качестве датчиков обратной связи по углу в следящих системах программного управления автоматами.
Конструкция
вращающегося трансформатора.
Вращающиеся (поворотные трансформаторы
отличаются от статических тем, что
конструктивна они выполнены как
электрические машины. Пакеты статора
и ротора набираются из ластов
электротехнической стали или пермаллоя.
В пазах статора и ротора расположены
обмотки вращающегося трансформатора.
Отношение чисел витков обмоток дает
коэффициент трансформации:
![]() . Как правило,
. Как правило,
![]() .
.
Вращающиеся
трансформаторы выпускают в двух основных
исполнениях: барабанном (двукполюсные)
и дисковом (многополюсные, до
![]() ).
Вращающиеся трансформаторы выполняют
бесконтактными (с числом оборотов ротора
2-3) и с контактными кольцами.
).
Вращающиеся трансформаторы выполняют
бесконтактными (с числом оборотов ротора
2-3) и с контактными кольцами.
Вращающиеся
трансформаторы предназначены для
преобразования угла поворота ротора
![]() в напряжения, пропорциональные функциям
в напряжения, пропорциональные функциям
![]() ,
и
,
и
![]() ,
или линейное относительно
.
,
или линейное относительно
.
На статоре и роторе
синусно-косинусного вращающегося
трансформатора (СКВТ) имеется по
две обмотки, сдвинутые относительно
друг друга на угол
![]() .
.
СКВТ выполняет
функцию датчика угла поворота, преобразуя
угол поворота
в один из параметров сигнала
переменного тока, снимаемого с роторной
обмотки. Отсчет угла поворота ротора
проводят от оси квадратурной обмотки
до оси синусной обмотки против направления
вращения часовой стрелки. На обмотку
возбуждения подается напряжение частотой
400 Гц и выше. Главная особенность СКВТ
состоит в том, что при повороте ротора
изменяется взаимная индуктивность
между обмотками статора и ротора, а,
следовательно, и амплитуда ЭДС в обмотках
ротора, наведенная пульсирующим потоком
возбуждения, по синусоидальному
(косинусоидальному) закону в функции
угла поворота ротора
![]() .
В синусной обмотке,
.
В синусной обмотке,
![]() ,
в косинусной обмотке
,
в косинусной обмотке
![]() .
В режиме холостого хода напряжение на
зажимах обмоток ротора СКВТ будет
строго соответствовать заданной форме.
.
В режиме холостого хода напряжение на
зажимах обмоток ротора СКВТ будет
строго соответствовать заданной форме.
Датчики скорости – тахогенераторы:
Назначение датчиков скорости (ДС) – преобразование угловой скорости двигателя или скорости движения рабочего органа механизма в электрический сигнал. В системах АЭП ДС используются для реализации обратной связи по скорости. В качестве ДС нашли широкое применение тахогенераторы (ТГ) — микромашины постоянного и переменного токов.
а) Тахогенератор постоянного тока: представляет собой электрическую машину постоянного тока с независимым возбуждением или постоянными магнитами. На работу ТГ существенное влияние оказывают конструктивно-технологические погрешности. Это коллекторные пульсации напряжения, обусловленные конечным числом коллекторных пластин, пульсации из-за зубцовой конструкции якоря, оборотные пульсации, вызванные несимметрией воздушного зазора. Погрешности от указанных пульсаций сильнее искажают выходной сигнал ТГ в области низких скоростей. При снижении скорости уменьшается их частота и увеличивается амплитуда относительно уровня передаваемого сигнала. Эти погрешности ограничивают нижний предел скорости ТГ. Для уменьшения перечисленных пульсаций тахогенераторы выполняются с повышенным числом коллекторных пластин, со скошенными по винтовой линии на одно зубцовое деление пазами якоря, с увеличенным воздушным зазором. Тахогенераторы высокой точности выполняются с полым беспазным якорем. Для дополнительного снижения пульсаций к выходу ТГ подключают конденсатор.
б)Тахогенераторы переменного тока: выполнены на базе асинхронной двухфазной машины. Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой - генераторной обмотки (ГО) снимается выходное напряжение.
Принцип действия асинхронного тахогенератора заключается в следующем. При питании обмотки возбуждения переменным током частоты возникает пульсирующий магнитный поток, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС и ЭДС вращения. В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток Ф, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку Ф, он не будет индуцировать в ней никакой ЭДС.
Датчики тока
В системах АЭП контролируемыми и регулируемыми координатами являются не только механические величины (угол поворота, скорость, ускорение), но и электрические величины (ток, напряжение, ЭДС, мощность). Для измерения этих координат используются соответствующие датчики. К числу типовых можно отнести датчики тока (ДТ). Назначение ДТ – преобразование входной величины (тока цепи преобразователя) двигателя в выходной сигнал, пропорциональный входной величине. Собственно датчиком является вводная цепь – делитель напряжения, шунт, трансформатор напряжения или тока с выпрямителем. Эта цепь преобразует измеряемые напряжения или ток во входное напряжение постоянного тока.
Вопрос №4. Цифровые системы управления электроприводами. Структурная схема цифровой системы управления.
Тоже самое, что и Вопрос №9 (только без частотных преобразователей!!!!).
Вопрос №5. Асинхронные электроприводы. Асинхронные электродвигатели систем автоматического регулирования. Режимы работы асинхронных машин. Способы регулирования частоты вращения АД. Силовые схемы асинхронных приводов.
Асинхронные электродвигатели широко используются для электроприводов с постоянной (нерегулируемой) частотой вращения, в которых требования по поддержанию частоты вращения сравнительно невелики. Нашли применение регулируемые асинхронные электроприводы с управлением по напряжению и частоте питания. Актуальность разработки асинхронных электроприводов обусловлена: экономическими факторами (минимум стоимости, отсутствие дефицитных видов материалов, повышенный (на 6 - 10%) коэффициент полезного действия по сравнению с приводами постоянного тока); повышенная на 50-100% удельная мощность высокочастотных (200,400,1000 Гц) асинхронных электродвигателей; пониженный момент инерции ротора по сравнению с синхронными электродвигателями; повышенная надежность (в 3 - 5 раз) по сравнению с двигателями постоянного тока.
В системах автоматического регулирования применяют как трехфазные, так и двухфазные асинхронные электродвигатели (АД). Трехфазные АД являются двигателями общепромышленного применения, двухфазные АД - это специальные двигатели, получившие название асинхронных исполнительных двигателей (АИД). В системах автоматического регулирования наибольшее распространение получили АИД с полым немагнитным ротором в виде тонкостенного стакана из сплавов алюминия. Толщина стенки стакана ротора в зависимости от мощности электродвигателя колеблется в пределах 0,1 - 1 мм. Полый ротор имеет малую массу, а следовательно, незначительный момент инерции.
Недостатком АИД с полым немагнитным ротором является большой немагнитный зазор, состоящий из двух воздушных зазоров и толщины немагнитного стакана, вследствие чего эти электродвигатели имеют значительный ток намагничивания (до 80 - 90 % от номинального тока) и соответственно низкий коэффициент мощности. Большой намагничивающий ток приводит к повышенным электрическим потерям и значительно снижает КПД электродвигателя.
Режимы работы асинхронных машин:
а)
Двигательный режим: характеризуется
изменением частоты вращения электродвигателя
от нуля (точка пуска)
до
![]() (точка
идеального холостого хода) при
соответствующем изменении
момента (тока) от
(точка
идеального холостого хода) при
соответствующем изменении
момента (тока) от
![]() до нуля (первый квадрант).
до нуля (первый квадрант).
б) Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту . В генераторном режиме скольжение s < 0, ток и момент вращения также меняют знак. Режим рекуперативного торможения может быть реализован в системе преобразователь частоты - АД при остановке электродвигателя или при переходе с большей частоты вращения на меньшую. Рекуперативное торможение является наиболее экономичным видом торможения АД.
в) Динамическое торможение: применяется для быстрой остановки вращающегося двигателя. Режим динамического торможения осуществляется следующим образом: фазы статора отключаются от сети переменного тока и одна фаза, если выведен нуль, или две фазы, соединенные последовательно, подключаются к источнику постоянного тока. Постоянный ток, создает неподвижное в пространстве магнитное поле, в котором вращается ротор. Создается тормозной момент и двигатель останавливается.
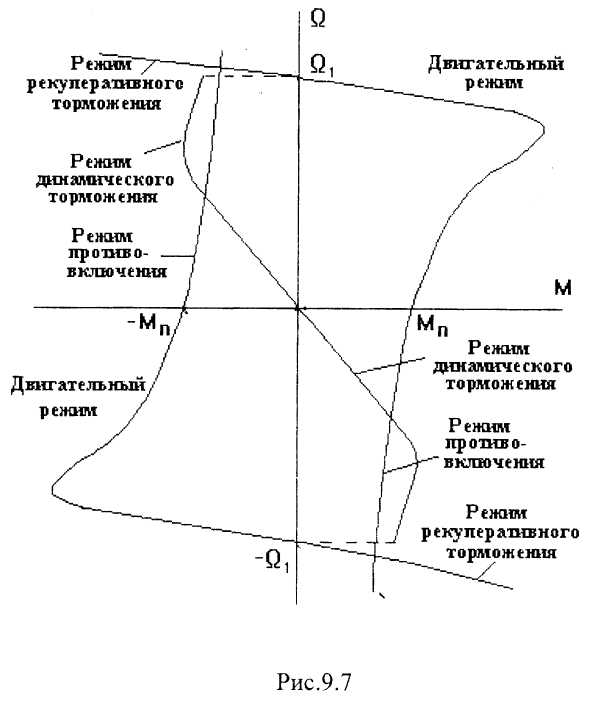
г) Торможение противовключением: данный режим имеет место тогда, когда во вращающемся двигателе переключают две фазы статорной обмотки, что приводив к изменению направления вращения поля статора: ротор и поле статора вращаются в противоположных направлениях. В режиме противовключения скольжение s>l. Двигатель потребляет из сети активную мощность, в то же время потребляется механическая мощность вращающегося ротора. Обе эти мощности преобразуются в потери, так как полезная мощность равна нулю. Ротор энергично тормозится. Если в момент, когда s =1, фазы обмотки статора не будут отключены от сети, то ротор будет разгоняться в противоположном исходному направлению вращения и произойдет реверс двигателя.
Регулирование частоты вращения АД. Существует три возможных способа регулирования частоты вращения: изменением частоты питающего напряжения; изменением числа пар полюсов машины; изменением значения скольжения.
а) Способ переключения числа пар полюсов
Для реализации этого способа предусматривается в обмотке статора переключение секций фаз из последовательного соединения в параллельное и наоборот. Существуют АД с несколькими обмотками статора, имеющими различное число пар полюсов. Этот способ является наиболее простым, однако частота вращения изменяется дискретно. В системах автоматического регулирования этот способ применяется редко.
б) Способ изменения величины скольжения
Величина момента вращения трехфазных АД зависит от квадрата приложенного напряжения. Меняя величину напряжения, подаваемого на фазы статора АД, например, с помощью трехфазного МУ или тиристорного преобразователя для двигателя, работающего под нагрузкой, смещаем точку установившегося режима. В настоящее время существует большое число различных схем включения тиристоров, позволяющих коммутировать статорные цепи АД и регулировать подводимое к двигателю напряжение.
При тиристорном регулировании напряжения по мере увеличения угла управления тиристоров напряжение статора принимает все более импульсный характер, возникают высшие гармонические напряжения и тока, в свою очередь вызывающие повышенные тепловые и магнитные потери, а также высшие гармонические момента вращения, являющиеся тормозными по отношению к основной частоте.
Коэффициент полезного действия АИД несколько ниже, чем у одинаковых по мощности асинхронных трехфазных двигателей из-за повышенного активного сопротивления ротора. При этом наиболее высокий КПД имеют АИД с амплитудным управлением. Поэтому рассмотрим только характеристики АИД с амплитудным управлением.
Регулировочные характеристики АИД нелинейны при всех способах управления. Наибольшая нелинейность наблюдается в режиме холостого хода (до 20%).
в) Формирование механических характеристик замкнутого электропривода
Электроприводы, регулируемые по напряжению, имеющему систему управления с замкнутыми обратными связями, находят применение при небольшом диапазоне регулирования частоты вращения.
Желаемая скорость и заданная жесткость механических характеристик асинхронного электропривода с замкнутой системой управления обеспечивается соответствующим выбором величины коэффициента усиления, регулятора скорости и напряжения сравнения (напряжение задатчика скорости).
г) Способ изменения частоты питающего напряжения
Наиболее рациональным способом плавного регулирования частоты вращения АД является частотный способ.
При небольших частотах происходит снижение значения максимального (критического) момента из-за влияния падения напряжения на активном сопротивлении обмотки статора. Для предотвращения этого эффекта следует с уменьшением частоты снижать напряжение в меньшей степени, чем это рекомендуется указанной формулой.
Частотный способ позволяет увеличить частоту вращения по отношению к номинальной в 2 - 3 раза. Ограничение - по механической прочности ротора и потерям в стали, которые увеличиваются пропорционально квадрату относительного значения напряжения. Нижний предел снижения частоты вращения относительно номинальной определяется допустимыми пульсациями скорости и величиной момента статического сопротивления при трогании двигателя с места.
При уменьшении частоты напряжения статора основной поток машины снижается за счет падения напряжения в активном сопротивлении статорных обмоток в тем большей степени, чем меньше значение частоты сети. Поток сравнительно мало меняется при частотах, близких к номинальному значению. Основным достоинством режима постоянного полного потока является то, что при всех частотах сохраняются такие же условия работы электродвигателя, как при номинальной частоте. Постоянство полного потока при всех частотах обеспечивается компенсацией падения напряжения в активных сопротивлениях статора соответствующим повышением напряжения на зажимах двигателя в функции частоты и нагрузки.
д) Векторное управление асинхронными электродвигателями
Разновидностью частотного управления АД являются частотно-токовое и фазовекторное управление током и напряжением статора асинхронного электродвигателя в полярных или декартовых координатах. Векторное управление АД позволяет решать задачи не только инвариантного управления моментом или скоростью, но и оптимального управления магнитным полем как по величине, так и по фазе по отношению к вектору тока или вектору напряжения статора. Векторное управление асинхронными электродвигателями позволяет довести качество управления асинхронными электроприводами до лучших образцов электроприводов постоянного тока: полоса пропускания 100 - 200 Гц, диапазон регулирования скорости 1 : (10 000 - 20 000), номинальная частота вращения 3000 - 12 000 об/мин.
Типовые силовые схемы силовой части асинхронных электродвигателей. Силовая схема асинхронного электропривода с АИТ с отсекающими диодами приведена ниже.
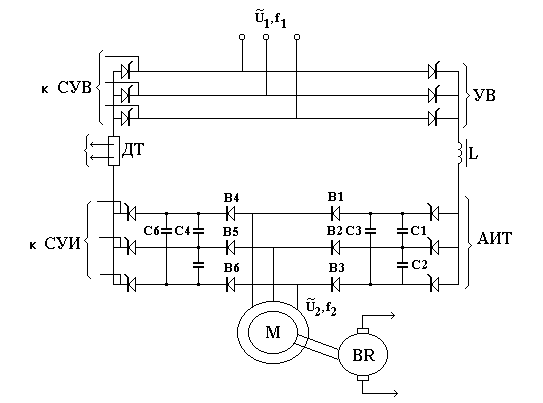
Рис.13.23.Тиристорный частотнорегулируемый асинхронный электропривод
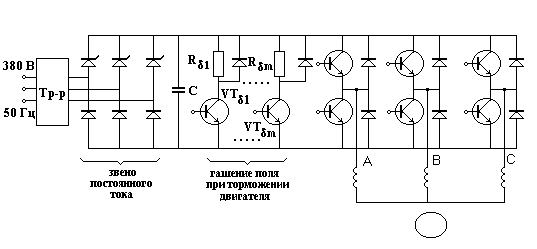
Рис.13.24. Транзисторный частотнорегулируемый асинхронный электропривод с АИН
Силовая схема электропривода, регулируемого по напряжению, имеющему систему управления с замкнутыми обратными связями по току и скорости, представлена на рис.13.26.Такие электроприводы находят применение при небольшом диапазоне регулирования частоты вращения (1 : 20).
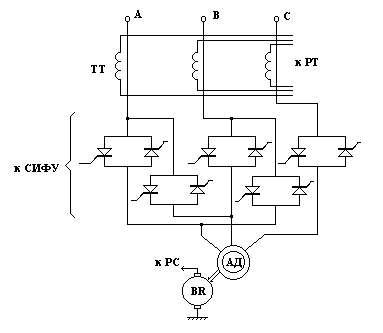
Рис.13.26.Электропривод типа СТУ-ПР-2.
Вопрос №6. Электроприводы постоянного тока. Режимы работы. Силовые схемы приводов постоянного тока. Тиристорные и транзисторные преобразователи.
Электропривод постоянного тока – это электрическая машина, преобразующая электрическую энергию постоянного тока в механическую энергию.
Достоинства: 1) простота устройства и управления 2) практически линейные механическая и регулировочная характеристики двигателя 3) легко регулировать частоту вращения 3) большой пусковой момент 4) являются обратимыми машинами (работа как в двигательном, так и в генераторном режимах). Недостатки: 1) дороговизна изготовления 2) необходимость профилактического обслуживания коллекторно-щеточных узлов 3) ограниченный срок службы из-за износа коллектора.
Принцип действия

Пусть имеем машину,
содержащую два витка и две пары
коллекторных пластин. При подключении
к щеткам внешнего источника постоянного
тока по витку будет протекать ток
![]() ,
который будет создавать внутреннее
магнитное поле. В условиях существования
внешнего магнитного поля от полюсов N,
S произойдет взаимодействие двух полей,
что приведет к возникновению
электромагнитной силы (
,
который будет создавать внутреннее
магнитное поле. В условиях существования
внешнего магнитного поля от полюсов N,
S произойдет взаимодействие двух полей,
что приведет к возникновению
электромагнитной силы (![]() ).
Она определяется по следующей формуле
).
Она определяется по следующей формуле
![]() .
Направление силы определяется по правилу
левой руки.
.
Направление силы определяется по правилу
левой руки.
Совокупность электромагнитных сил создающих вращающий момент якоря. Это объясняется тем, что перемещение проводника под другой полюс связано со сменой коллекторной пластины. В этом и заключается принцип преобразования электрической энергии в механическую. В электрических машинах происходит взаимодействие двух магнитных полей. Это неподвижное поле (поле статора) и подвижное поле (поле ротора). Образованные неподвижные поля называются возбуждением электрических машин.
Электрические машины постоянного тока могут работать как в генераторном режиме (тормозном режиме), так и в двигательном. Двигательные режим работы – режим, при котором электрическая энергия преобразуется в механическую. Тормозные режимы - это генераторные режимы, поскольку механическая энергия, поступившая с вала машины, преобразуется в электрическую и передается через электрические зажимы машины.
В настоящее время вентильные преобразователи напряжения находят весьма широкое применение в системах АЭП постоянного тока. Широкое использование вентильных преобразователей обусловлено успешным развитием полупроводниковой техники, а именно освоением промышленностью надежных, малогабаритных управляемых силовых вентилей – тиристоров и транзисторов.
В большинстве современных преобразователей для привода в качестве силовых вентилей используются тиристоры.
Тиристорные преобразователи обладают рядом достоинств:
1) высокий КПД, обусловленный незначительным падением напряжения на тиристоре (менее 1 В);
2) незначительная инерционность, обусловленная фильтрами в цепях управления и неуправляемостью тиристоров в течение интервала проводимости (10—20 мс);
3) высокая надежность при использовании быстродействующей защиты и модульно-блочном исполнении ТП.
К недостаткам ТП следует отнести: низкий коэффициент мощности при глубоком регулировании напряжения; искажения питающего напряжения, вносимые работой ТП; повышенный уровень излучаемых радиопомех.
Приведем силовую схему тиристорного электропривода:

Транзисторные преобразователи. Импульсное управление. Сущность импульсного управления состоит в том, что регулирование частоты вращения электродвигателя не за счет изменения величины напряжения управления, а за счет изменения времени, в течение которого подводится это напряжение. При импульсном управлении работа двигателя состоит из чередующихся периодов разгона и торможения, то есть частота вращения двигателя непрерывно колеблется относительно некоторого среднего значения. С увеличением относительной продолжительности включенного состояния среднее значение частоты вращения растет. Для быстродействующих электроприводов с широким диапазоном регулирования, высокой точностью и хорошими энергетическими показателями важно, чтобы преобразователь обладал малой инерционностью, двусторонней проводимостью и малым сопротивлением выходного каскада. Этим требованиям отвечают транзисторные преобразователи с широтно-импульсной модуляцией выходного напряжения.
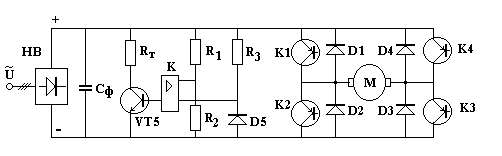
НВ - неуправляемый выпрямитель, Сф -конденсатор фильтра, К- компаратор.
Возможна частичная рекуперация энергии от двигателя в конденсатор.При возрастании напряжения на конденсаторе выше нормы компаратор, сравнивая напряжение конденсатора с эталонным, открывает транзистор VT- 5 и происходит частичный разряд конденсатора на сопротивление Rт.
Вопрос №7. Вентильный электропривод. Принцип действия. Силовые схемы вентильного электродвигателя. Датчики положения ротора.
Вентильный двигатель - бесконтактный электродвигатель, пришедший на замену двигателю постоянного тока (замена щеточно-коллекторного узла полупроводниковым коммутатором, выполняющим его функции). Отличительной конструктивной особенностью вентильных электродвигателей является наличие датчика положения ротора на валу машины, по сигналам которого происходит переключение фаз обмотки якоря с помощью полупроводникового преобразователя типа инвертора. Датчик положения служит для определения относительного положения осей полюса (магнита) ротора и статорных обмоток электродвигателя.
Датчик положения ротора может быть разных видов: магнитоиндукционный; магнитоэлектрический; оптоэлектрический.
При замене механического коммутатора (коллектора со щетками) полупроводниковым коммутатором электродвигатель становится более надежным и долговечным, создает меньше радиопомех, в то время как у двигателя постоянного тока щетки быстро изнашиваются и имеет место значительное искрение и радиопомехи.
Вентильные электродвигатели являются одними из самых перспективных для приводов роботов. Имея характеристики, аналогичные характеристикам двигателей постоянного тока, вентильные двигатели являются бесконтактными.
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора (Ф0) поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг. В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Силовые схемы вентильного электродвигателя.
Электрические схемы вентильных электродвигателей можно подразделить на схемы с разомкнутой и схемы с замкнутой обмоткой якоря.
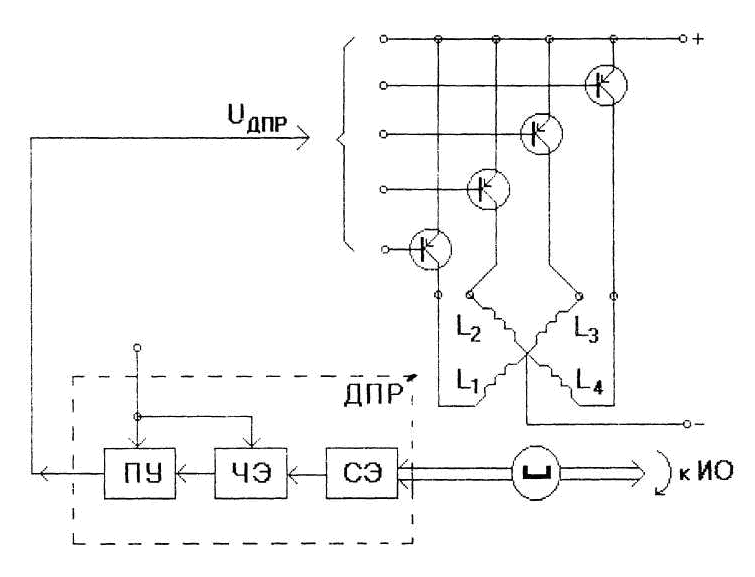
ПУ - преобразующее устройство, вырабатывающее сигналы для управления транзисторами. Преобразующее устройство представляет собой усилитель-выпрямитель или усилитель ограничитель, которые формируют однополярные или двуполярные импульсы прямоугольной формы для управления полупроводниковыми ключами.
С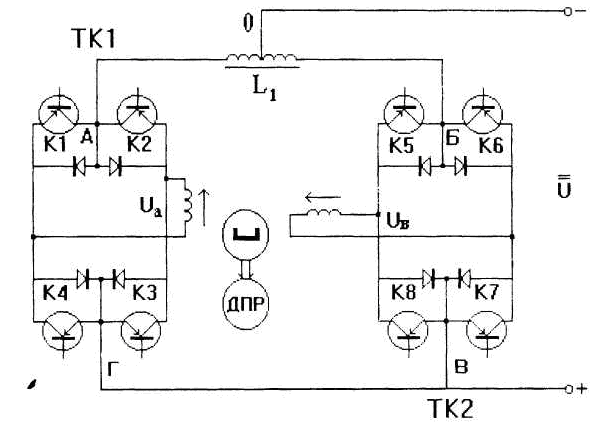 хема,
приведенная на рис. выше, имеет
бесконтактный моментный электропривод
с вентильным электродвигателем типа
ДБМ с синусоидальной позиционной
модуляцией питающего фазы напряжения.
хема,
приведенная на рис. выше, имеет
бесконтактный моментный электропривод
с вентильным электродвигателем типа
ДБМ с синусоидальной позиционной
модуляцией питающего фазы напряжения.
Благодаря мостовой
схеме (рис. слева) включения транзисторов
имеется возможность управлять направлением
тока в фазах, а также смещать эти токи
по фазе на угол
![]() .
Дроссель
.
Дроссель
![]() выполняет роль сфазированной вольтодобавки.
Суммируясь с напряжением питания,
напряжения вольтодобавки, возникающие
как ЭДС еОА и еОБ обеспечивают
питание секций якорной обмотки
напряжениями, совпадающими по форме
с ЭДС якорных обмоток. Следствием этого
является отсутствие пульсаций токов
Iа, Iб фаз
обмотки статора и высокий КПД
двигателя.
выполняет роль сфазированной вольтодобавки.
Суммируясь с напряжением питания,
напряжения вольтодобавки, возникающие
как ЭДС еОА и еОБ обеспечивают
питание секций якорной обмотки
напряжениями, совпадающими по форме
с ЭДС якорных обмоток. Следствием этого
является отсутствие пульсаций токов
Iа, Iб фаз
обмотки статора и высокий КПД
двигателя.
Датчики положения ротора
Датчик положения ротора вентильного электродвигателя (ДПР) служит для определения относительного положения продольной оси ротора и осей фаз статорной обмотки для управления коммутацией полупроводниковых элементов в цепи питания фаз. В качестве датчиков положения ротора вентильных электродвигателей используются в основном индукционные, а также индуктивные, гальваномагнитные и фотоэлектрические датчики. Находят применение также датчики Холла, датчики с дросселями насыщения, трансформаторные датчики и др.
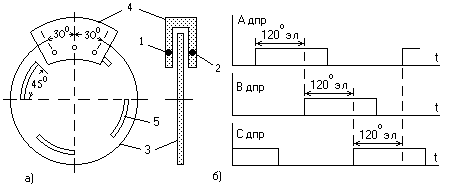
Фотоэлектрические датчики. Переключение фаз двигателя производится тиристорным коммутатором в функции сигналов ДПР, который состоит из трех пар свето- фотодиодов, жестко привязанных к фазам статора, и вращающегося диска, закрепленного на валу ротора. При рп = 1 диск имеет одну прорезь с угловым размером 180, а пары свето- фотодиодов разнесены в пространстве на угол 120. При рп = 2 диск имеет две прорези с угловым размером 90. При рп = 4 диск имеет четыре прорези с угловым размером 45°, а пары свето- фотодиодов разнесены друг от друга в пространстве на угол 30, как показано на рис.16.19.
Датчики Холла. Датчик Холла располагается в воздушном зазоре машины в зоне действия постоянных магнитов полюсов ротора так, чтобы магнитное поле пронизывало одну пару противоположных граней пластинки Холла. К другой паре противоположных граней подводится постоянный ток возбуждения. Тогда на противоположных гранях, расположенных в плоскости перпендикулярной четырем предыдущим граням, появится ЭДС Холла, отслеживающая как изменение индукции в воздушном зазоре, так и полярность полюсов ротора. Указанное свойство позволяет управлять двумя транзисторами, работающими в противофазе, а также реверсировать вентильный электродвигатель изменением направления тока возбуждения датчика.
Индуктивный датчик положения ротора. В индуктивных ДПР в качестве чувствительного элемента используются миниатюрные дроссели и трансформаторы. Сигнальный элемент датчика представляет из себя диск, на периферийной части которого расположены анизотропные электромагнитные участки по числу фаз обмотки статора электродвигателя. Около диска в области этих участков расположена обмотка чувствительного элемента, запитанная переменным напряжением и воспринимающая перемещение анизотропных участков при вращении диска. При этом изменяется индуктивное сопротивление обмотки в широких пределах. К обмотке подключена схема, формирующая электрические сигналы при изменении индуктивного сопротивления обмотки. Логическое устройство распределяет сигналы между силовыми полупроводниковыми элементами в цепи фаз обмотки статора электродвигателя.
Трансформаторный датчик положения ротора. Конструктивно трансформаторный датчик аналогичен дроссельному, за исключением якоря, в котором сектор постоянного магнита имеет дугу, равную 2/(pпол m) . Первичные обмотки трансформаторов соединены последовательно и подключены к выходной обмотке высокочастотного трансформатора. Вторичные обмотки трансформаторного датчика через диоды управляют ключами коммутатора силовой цепи вентильного электродвигателя. Когда сердечник трансформаторов датчика не насыщен потоком постоянного магнита, напряжение первичных обмоток трансформаторного датчика трансформируется во вторичные обмотки и открывает силовые ключи. При входе постоянного магнита в чувствительную зону датчика сердечники трансформаторов насыщаются потоком магнита и электромагнитная связь обмоток трансформаторов нарушается, выходной сигнал становится минимальным, недостаточным для открытия транзисторов и ключи закрываются.
Датчик положения ротора с магнитодиодами. В тех случаях, когда ротором служит цилиндрический постоянный магнит в воздушном зазоре электродвигателя на статоре укрепляются три магнитодиодных пары с угловым расстоянием 120 .
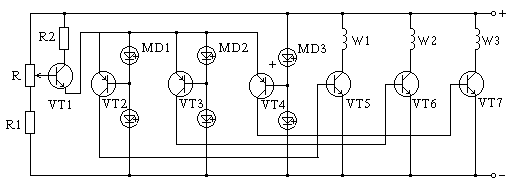
С помощью потенциометра R управляют потенциалом эмиттера транзистора VT1 так, чтобы транзисторы VT2 - VT4 открывались при срабатывании магнитодиодов в соответствующем плече и обеспечивали в каждой из обмоток фаз вентильного электродвигателя ток в течение времени, за которое ротор повернется на угол 120.
Рамочные датчики. Датчик положения ротора содержит полый цилиндр, вращаемый ротором электродвигателя. Внутри цилиндра расположена магнитная вставка на которой уложена первичная обмотка, питаемая от генератора импульсов. Ротор охватывается магнитопроводом, в пазах которого уложены детекторные обмотки рамочного типа по числу фаз электродвигателя. Полый ротор выполнен в виде разрезного цилиндра /16/. При вращении цилиндра последовательно изменяется магнитная связь между первичной обмоткой и детекторными обмотками и, соответственно, детекторные обмотки по очереди отпирают соединенные с ними управляющие транзисторы, удерживающие в открытом состоянии силовые транзисторы фаз электродвигателя.
Вопрос №8. Шаговый электропривод. Принцип действия. Режим работы ШД. Силовые схемы шагового электропривода.