

Механические характеристики электродвигателей
Механическая
характеристика электродвигателя –
зависимость его частоты вращения от
вращающего момента
![]() или
или
![]() .
.
Степень изменения
частоты вращения (![]() )
с изменением момента у различных типов
электродвигателей неодинакова. Величина,
характеризующая это изменение называется
жесткостью механической характеристики
(
)
с изменением момента у различных типов
электродвигателей неодинакова. Величина,
характеризующая это изменение называется
жесткостью механической характеристики
(![]() ).
).
![]() или
или
![]()
![]()
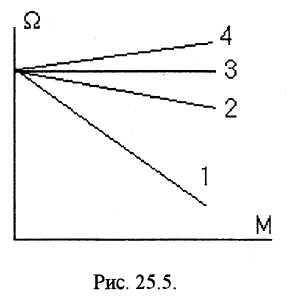
Механически характеристики электродвигателей можно разделить на три основные категории в зависимости от жесткости ( ).

Абсолютно жесткая характеристика – это характеристика, при которой частота вращения с изменением момента остается неизменной. Например, синхронный двигатель (кривая 1).
Жесткая механическая характеристика – это характеристика, при которой частота вращения с изменением момента хотя и падает, но в малой степени. Например, двигатель постоянного тока независимого возбуждения (кривая 3) и асинхронный двигатель (кривая 2).
Мягкая механическая характеристика – это характеристика, при которой происходит значительное изменение частота вращения с изменением момента. Например, двигатель постоянного тока смешанного возбуждения (кривая 4) и последовательного возбуждения (кривая 5).
Вопрос №2. Способы формирования статических, механических характеристик с помощью обратных связей.
Формирование механических характеристик электродвигателей с помощью систем обратной связи по току, напряжению и частоте вращения рассмотрим на примере электропривода постоянного тока.
Введение положительной обратной связи по току якоря.
На
рисунке, указанном выше, представлены
следующие зависимости
![]() :
:
1 - естественная механическая характеристика электродвигателя,
2 -
зависимость при наличии обратной
связи
![]() ,
,
3 -
зависимость при наличии обратной
связи и
![]() ,
,
4 -
зависимость при наличии обратной
связи и
![]() .
.
![]() -
суммарный коэффициент передачи, имеющий
размерность в омах;
-
суммарный коэффициент передачи, имеющий
размерность в омах;![]() - омическое сопротивление преобразователя;
- омическое сопротивление преобразователя;
![]() - омическое
сопротивление обмотки якоря.
- омическое
сопротивление обмотки якоря.
Очевидно,
что при равенстве
и
![]() можно
получить идеально жесткую механическую
характеристику электропривода, однако,
даже при незначительном увеличении
значения
в
силу каких-либо возмущений система
теряет устойчивость.
можно
получить идеально жесткую механическую
характеристику электропривода, однако,
даже при незначительном увеличении
значения
в
силу каких-либо возмущений система
теряет устойчивость.
Введение отрицательной обратной связи по току якоря.
Отрицательная обратная связь по току позволяет стабилизировать момент вращения, отстраиваться от возмущений, связанных с изменением напряжения сети. Однако, частота вращения, при возмущениях момента на валу, токовым контуром постоянной не поддерживается. На практике эта обратная связь, как правило, используется совместно с обратной связью по скорости.
Введение отрицательной обратной связи по напряжению на якоре.
Несмотря на недостатки приводов с обратной связью по напряжению (недостаточная жесткость механических характеристик), они широко используются в промышленности благодаря своей простоте и надежности, в тех случаях, когда нет высоких требований к точности поддержания частоты вращения. На практике обратная связь по напряжению часто применяется совместно с положительной обратной связью по току. Регулятор напряжения, подчиненный регулятору тока, рекомендуется применять в системе авторегулирования с вентильным преобразователем при наличии режима прерывистых токов.
Введение отрицательной обратной связи по частоте вращения якоря.
М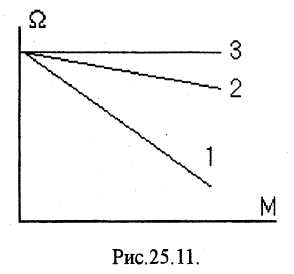 еханические
характеристики электропривода при
различных значениях суммарного
коэффициента усиления системы
представлены на рис. 25.11.
еханические
характеристики электропривода при
различных значениях суммарного
коэффициента усиления системы
представлены на рис. 25.11.
Кривая
1 - естественная механическая
характеристика,
![]() ;
;
2 - при
![]() ;
3 – при
;
3 – при
![]() .
Очевидно преимущество
больших значений
.
Однако известно, что при
.
Очевидно преимущество
больших значений
.
Однако известно, что при
![]() стремящемся к бесконечности система
становится неустойчивой. Поэтому
при больших коэффициентах усиления ОУ
регуляторы скорости выполняют обычно
ПИ-типа.
стремящемся к бесконечности система
становится неустойчивой. Поэтому
при больших коэффициентах усиления ОУ
регуляторы скорости выполняют обычно
ПИ-типа.
Комбинируя различные способы создания обратных связей можно получить различные системы управления электроприводами. Обычно применяют одновременно отрицательные обратные связи по скорости и току якоря, достигая тем самым регулирования при постоянной мощности. Наиболее распространены 2-х и 3-х контурные системы, причем в позиционных электроприводах обязательно присутствует контур положения.
Типовые схемы управления электроприводов можно подразделить на два типа: схемы с общим суммирующим усилителем; схемы подчиненного регулирования. Достоинство схем первого типа в простоте системы - на вход усилителя подается алгебраическая сумма сигналов обратных связей. Недостаток - невозможность регулирования координат независимо друг от друга. В схемах подчиненного регулирования число усилителей равно числу координат. При этом выходной сигнал внешнего контура является задающим сигналом для внутреннего контура, то есть каждый внутренний контур подчинен внешнему контуру Операционные усилители называют регуляторами, соответственно: положения, скорости, тока. Контуры тока и скорости в большинстве электроприводов выполняют с непрерывной системой управления, которую принято называть аналоговой. Внешний контур управления - контур положения в электроприводах роботов и станков с ЧПУ принято выполнять цифрового типа.
Вопрос №3. Датчики положения, скорости и тока, применяемые в электроприводе.
Функционально датчики можно подразделить на два основных типа: датчики внутреннего состояния (локальные) и датчики внешнего состояния (системные датчики).
К системным датчикам относятся: датчики положения рабочего органа; сенсорные датчики; конечные путевые датчики. К локальным датчикам электропривода относятся: датчики положения электропривода; датчики положения ротора относительно фаз статора электродвигателя; датчики скорости; датчики тока; датчики магнитного поля электродвигателя.
Датчики положения