

3.8 Точки в нескінченності
Використання однорідних координат дає зручний та оперативний спосіб відображення безлічі точок однієї координатної системи в відповідні множини перетвореної системи координат. Як правило нескінченна область однієї координатної системи буде відображатися в кінцеву область іншої координатної системи. При цьому прямі лінії, паралельні в одній системі координат, в загальному випадку, не будуть паралельними в іншій.
Геометричні властивості, наприклад точку перетину, зламу, можна оцінити в будь-якій з цих систем координат.
Нехай дві лінії задані рівняннями

та мають точку перетину

Це рішення може бути отримано в елементарній однорідній системі координат.
Перепишемо рівняння у вигляді

Їх можна представити в матричній формі:

де

AT=B

Розглянемо другий тип, який не має зворотної матриці:

Рішень немає, лінії паралельні tgα=1, але можливий інший вираз, який дозволяє мати зворотну матрицю:
М ножимо
дві частини рівняння на обернену матрицю.
ножимо
дві частини рівняння на обернену матрицю.
Результуючі
однорідні координати
 повинні представляти “точку
перетину”
двох паралельних ліній в нескінченності.
повинні представляти “точку
перетину”
двох паралельних ліній в нескінченності.
Зазвичай двовимірний однорідний вектор [a b 0] утворює точку в нескінченності на лінії ay-bx = 0. Той факт, що вектор з компонентою h=0 представляє точку в нескінченності, може бути продемонстрований наступною процедурою.
Розглянемо
лінію
 та
точку
та
точку
 .
.
Так
як точка може бути представлена в
однорідних координатах будь-якими
способами, зауважимо, що при H→0
відношення
 залишається рівним 3/4.
Далі, наступні, одна за одною пари
залишається рівним 3/4.
Далі, наступні, одна за одною пари
 ,
які потрапляють на лінію
,
які потрапляють на лінію
 стають
ближче до нескінченності. Таким чином
в межі, коли H
→ 0,
точка прямує до нескінченності [x
y H]
→ [∞
∞ 1]
.
стають
ближче до нескінченності. Таким чином
в межі, коли H
→ 0,
точка прямує до нескінченності [x
y H]
→ [∞
∞ 1]
.
У такій формі однорідні координати дають зручне представлення точки в ∞ в доповнення до властивостей однорідних перетворень.
3.9 Двовимірне обертання навколо довільної осі
Раніше було розглянуто обертання зображення відносно початку координат. Однорідні координати забезпечують поворот зображення навколо точок відмінних від початку координат.
У загальному випадку, обертання навколо довільної точки, може бути виконано шляхом перенесення центру обертання в початок координат, поворотом щодо початку координат, а потім переносом точки обертання у вихідне положення.
Таким чином поворот вектора положення [x y 1] навколо довільної точки M (m, n) на кут θ може бути виконаний так:
 (3.18)
(3.18)
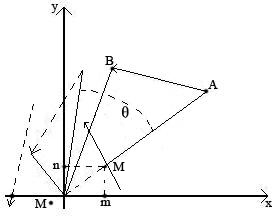
Рис.10 – Поворот вектора навколо довільної точки
Рис.11 – Обертання навколо осі OZ
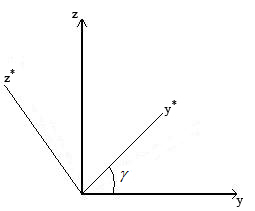
Рис.12 – Обертання навколо осі OX
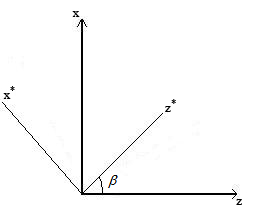
Рис.13 – Обертання навколо осі OY
4. 3D Операції
4.1 Тривимірне перетворення і проекція
Для найкращого сприйняття форми об'єкта, необхідно мати його зображення в трьохмірному просторі. У багатьох випадках початкове уявлення про об'єм, можна отримати лише шляхом виконання операцій обертання і переносу, а також шляхом побудови його проекції. У цьому не важко переконатися на прикладі деякого відносно складного об'єкта. Для того щоб отримати уявлення про його форму, конструктору необхідно виконати операцію обертання та спостереження на деякій відстані з різних сторін і т.д.
Якщо ці операції виконувати за допомогою ЕОМ, то всі результати отримані для плоского зображення, необхідно поширити на просторове. З метою цього введемо знову однорідні координати. Тоді точка в 3-ох-мірному просторі буде представлена в однорідних координатах [x y z] →
[x y z 1] або [X Y Z H].
Перетворення з однорідних координат описується співвідношенням:
( 4.1)
4.1)

Матриця T – деяка матриця перетворення. Узагальнена матриця перетворень 4х4 має вигляд:
(4.2)
Матриця [3х3] здійснює лінійне перетворення у вигляді: зміни масштабу, здвигу, обертання, відображення. Матриця-стовпець [3х1] – перетворення в перспективі. Матриця-рядок [1х3] – перетворення зміщення. Останній скалярний елемент S – повне перетворення масштабу.
Повне перетворення отримуємо шляхом впливу на вектор положення матрицею [4х4] і нормалізацією перетвореного вектора. Таке перетворення будемо називати – білінійним. Воно забезпечує виконання комплексу операцій (здвиг, зміщення, зміна масштабу та інші).