

1.2.4.Датчик момента
Датчик момента предназначен для создания момента противодействующего гироскопическому, для создания момента компенсирующего систематическую составляющую вредных моментов вокруг выходной оси ДУС.
Датчик представляет собой магнитоэлектрическую систему, преобразующую электрический ток в механический момент (рис. 7)
Основными элементами датчика момента являются магнит, магнитопровод и рамки с током.
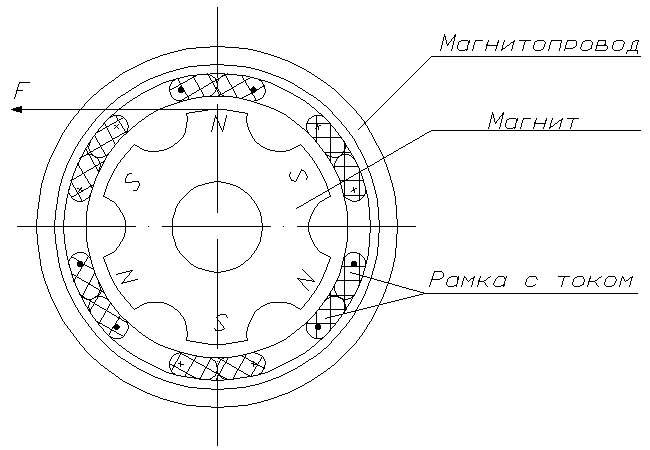
рис. 7
Принцип действия датчика момента основан на свойстве проводника с током взаимодействовать с внешним магнитным полем, в результате чего на магнит действует сила F, величина которой пропорциональна току в проводнике, а направление определяется правилом «левой руки». Сила, действующая на магнит, создает момент, величина которого определяется следующим выражением:
![]() где:
где:
n - число катушек участвующих в создании момента,
J - ток в катушках (А),
L - активная длина каждой катушки (см),
![]() - индукция в зазоре
(гаусс),
- индукция в зазоре
(гаусс),
W
- количество витков в катушке,
![]() - момент, развиваемый датчиком момента
(гсм)
- момент, развиваемый датчиком момента
(гсм)
![]() - диаметр
магнита.
- диаметр
магнита.
Как видно из приведенной зависимости, знак и величина момента зависит от направления и величины тока в его катушках.
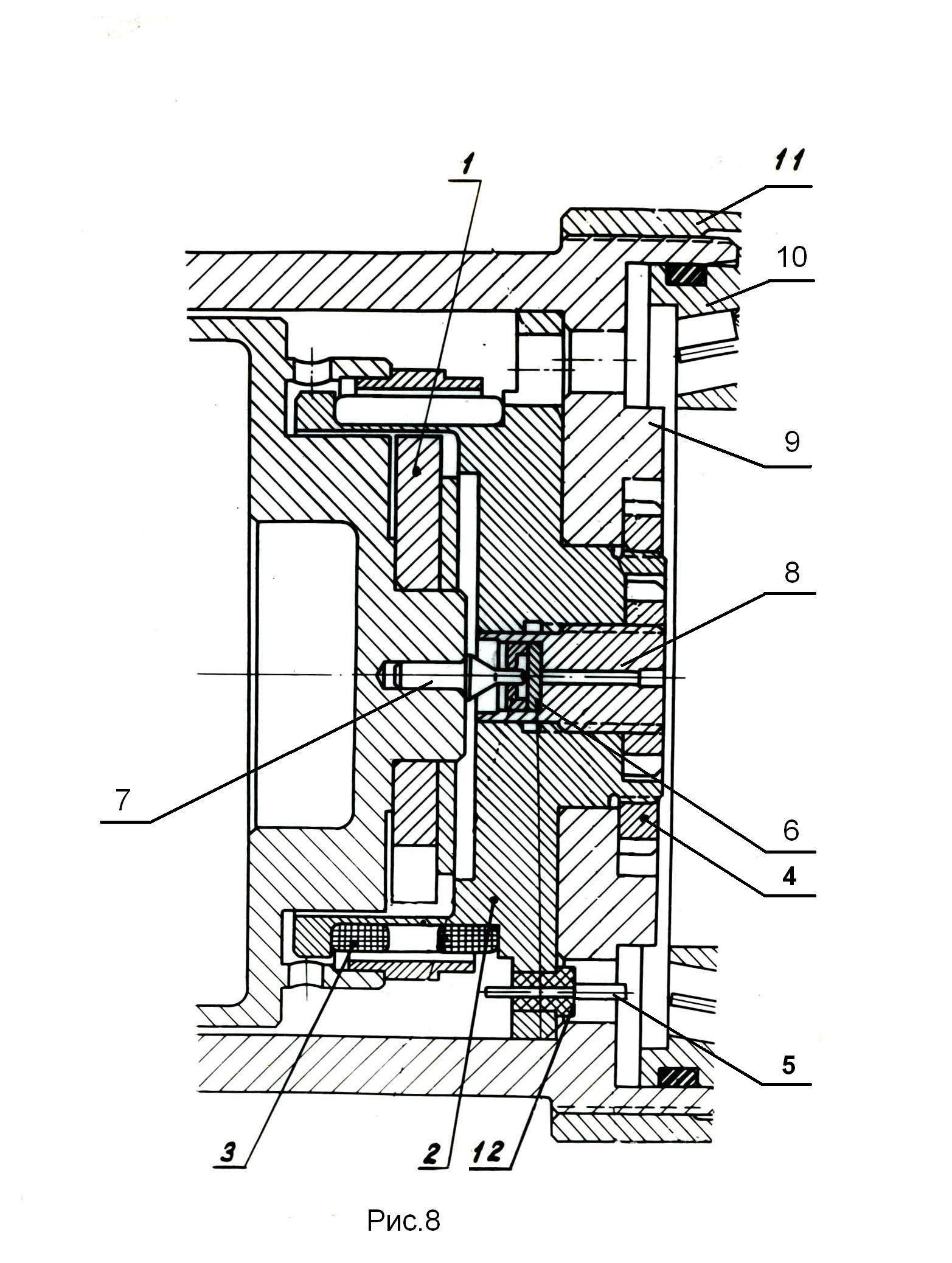
Основными конструктивными элементами датчика момента являются: постоянный магнит 1 (рис. 8) и стакан 2 с катушками 3.
Шестиполюсный постоянный магнит 1 является подвижной частью датчика момента. Магнит 1 отлит из специального сплава, установлен и приклеен на оси поплавка эпоксидным компаундом.
Стакан 2 с 6-ю катушками 3 установлен в корпусе прибора 9 и закреплен с помощью накидной гайки 4.
Выводные провода катушек подпаяны к неподвижным контактам 5 стакана 2, изолированных от него текстолитовами втулками 12, которые установлены в гнезда стакана на эпоксидном компаунде.
Датчик момента расположен на правом торце поплавка.
1.2.5.Описание общей конструктивной компоновки дус-л7а
Поплавок с помощью двух цапф 7 (рис. 8,6) подвешен в опорах – подшипниках 6. Подшипник состоит из подпятника и бушона, выполненного из камня (сапфир)
При равенстве
выталкивающей силы F
и силы тяжести G
поплавок находится в состоянии нейтральной
плавучести, при этом осуществляется
гидростатическая разгрузка опор
поплавка. Нагрузка на опоры появляется
в том случае, если имеет место остаточная
плавучесть
![]() .
Обычно
.
Обычно
![]() (1%от G),
следовательно, нагрузка на каждую опору
составляет величину
(1%от G),
следовательно, нагрузка на каждую опору
составляет величину
![]() .
Незначительная по величине нагрузка
на опоры позволяет использовать вместо
шарикоподшипников камневые опоры.
Момент трения этих опор незначительный.
Следовательно, в поплавковом ДУС можно
получить малую величину порога
чувствительности.
.
Незначительная по величине нагрузка
на опоры позволяет использовать вместо
шарикоподшипников камневые опоры.
Момент трения этих опор незначительный.
Следовательно, в поплавковом ДУС можно
получить малую величину порога
чувствительности.
Регулировка осевого люфта осуществляется с помощью втулки 8 (рис. 8)
С обеих сторон корпус 9 (рис. 6,8) закрыт крышками 10 с уплотнительными кольцами. Крышки 10 закрепляются накидными гайками 11 (рис. 6,8).
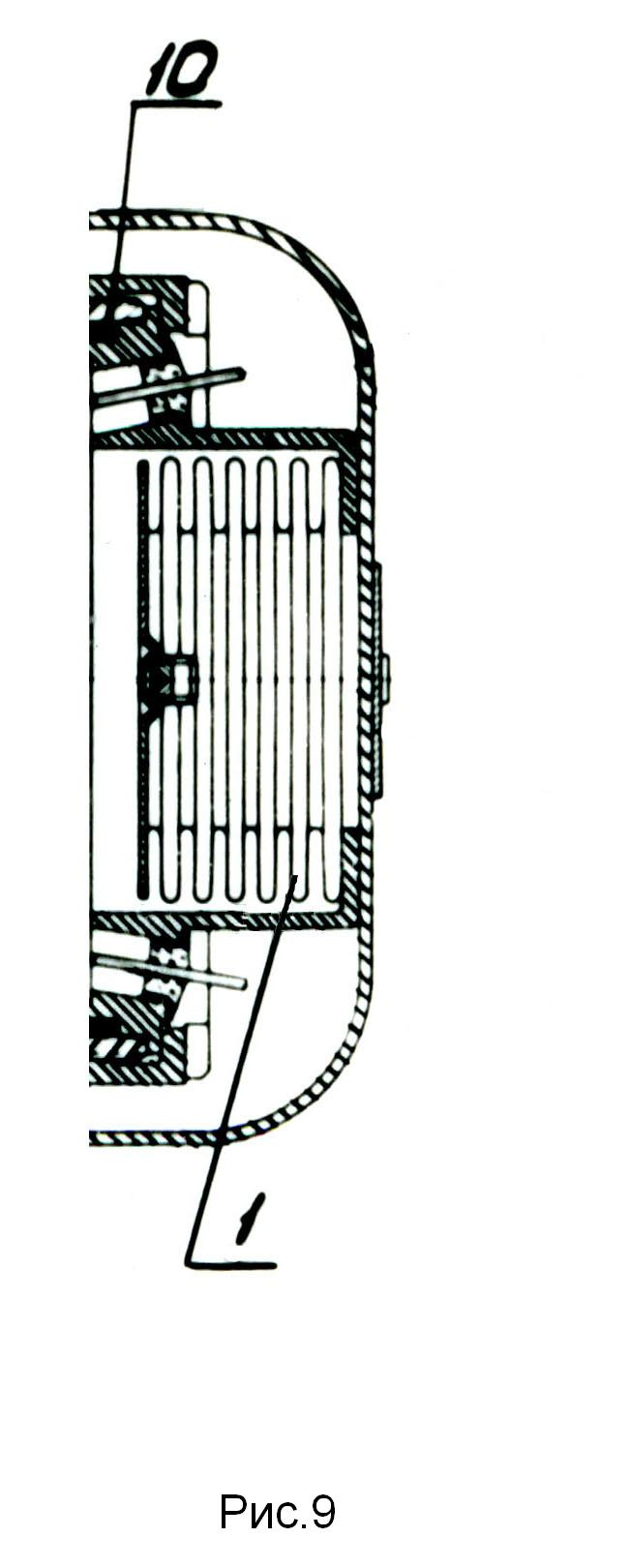
В крышку 10 со
стороны правого торца поплавка вмонтирован
сильфон 1 (рис. 9). Внутренняя полость
прибора заполнена жидкостью Б-ЛП с
удельным весом 2
![]() .
.
Сильфон предназначен для компенсации объемных изменений жидкости при колебаниях температуры.
Корпус прибора установлен во фланце 1(рис. 2), с помощью которого ДУС-Л7А крепится на объекте, и закрыт двумя кожухами 2 и 3, изготовленными из магнитомягкого материала и служащими для защиты от внешних магнитных влияний и скрытия монтажа. На торец кожуха 2 приклепан заводской знак 4 (рис. 2).
ДУС-Л7А во фланце 1 выставляется относительно его базовых поверхностей так, чтобы при вращении прибора со скоростью 3º /с вокруг осей, нечувствительных к скоростям, выходной сигнал был минимальным (не более 0,25 мА).
Осями, нечувствительными к угловым скоростям, являются ось собственного вращения z и выходная ось х.
Основные габаритные размеры датчика ДУС-Л7А представлены на (рис. 2).