

3. Разработка алгоритмов функционирования и программ моделирования демодуляторов в программной среде Mathcad
Алгоритм функционирования цифрового демодулятора сигнала частотной манипуляции и его моделирование
Простейший демодулятор сигнала частотной манипуляции состоит из частотного детектора на цифровой линии задержки и формирователя элементарных посылок.
Алгоритм функционирования частотного детектора представлен на рисунке 3.1.
Линия
задержки выполнена на
 элементах задержки, где
элементах задержки, где
 =1,2,…Количество элементов задержки
определяется по формуле
=1,2,…Количество элементов задержки
определяется по формуле

Рассчитанная величина округляется до ближайшего целого нечетного числа.


Рисунок 3.1 – Частотный детектор на цифровой линии
задержки
Формирователь элементарных посылок вырабатывает постоянный положительный уровень элементарной посылки, например, «1», если выходной сигнал детектора положителен и вырабатывает постоянный отрицательный уровень, например, «-1», если выходной сигнал детектора отрицателен.
Для моделирования демодулятора необходимо сформировать испытательный сигнал частотной манипуляции.
Эта операция осуществляется в два этапа:
1.Формируется случайная последовательность элементарных посылок позитива и негатива,
2. Осуществляется частотная модуляция несущей, которую вырабатывает генератор синусоидальных колебаний.
На первом этапе сначала формируется пилообразное колебание (рисунок 3.2), из которого получается последовательность единичных отсчетов на границах элементарных посылок (рисунок 3.3)
Константа ,
задающая частоту пилы равна
,
задающая частоту пилы равна

где
 – скорость манипуляции в бодах,
– скорость манипуляции в бодах,
 –
частота дискретизации в герцах.
–
частота дискретизации в герцах.
![]()
![]()

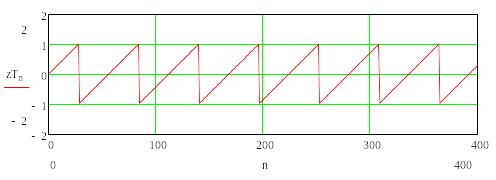
Рисунок 3.2 – Вспомогательное пилообразное колебание
Формируется последовательность единичных отсчетов на границах элементарных посылок
![]()
![]()
![]()
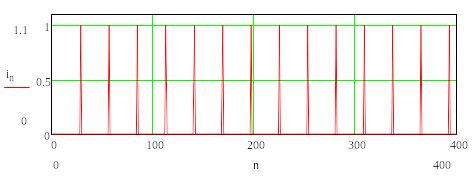
Рисунок 3.3 – Единичные отсчеты на границах элементарных посылок
Для получения последовательности элементарных посылок используется функция rnd(1), которая выдает случайное число в диапазоне от нуля до единицы. Если на границе элементарной посылки (при in>0) значение функции меньше 0.5 формируется посылка позитива, в противном случае формируется посылка негатива. Временная диаграмма случайной последовательности элементарных посылок приведена на рисунке 3.4.
![]()
![]()
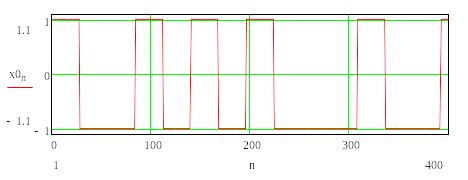
Рисунок 3.4 – Последовательность элементарных посылок
Управление частотой синусоидального сигнала осуществляется путем изменения частотозадающей константы A в зависимости от передаваемой посылки
 ,
,
где
 - константа, задающая частоту посылки
позитива,
- константа, задающая частоту посылки
позитива,

 -
константа, задающая частоту посылки
негатива,
-
константа, задающая частоту посылки
негатива,

При правильно выбранной частоте дискретизации средняя частота сигнала, приведенная в интервал Котельникова, равна

Формируем пилообразное колебание с изменяющейся частотой, а из него частотно-манипулированный сигнал
Временная диаграмма испытательного частотно-манипулированного сигнала приведена на рисунке 3.5.
![]()
![]()
![]()
![]()
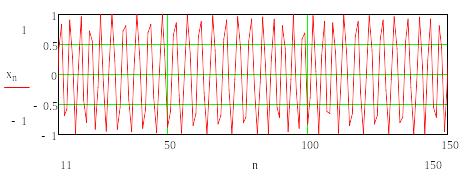
Рисунок 3.5– Испытательный частотно-манипулированный сигнал
![]()
![]()
![]()
![]()
![]()
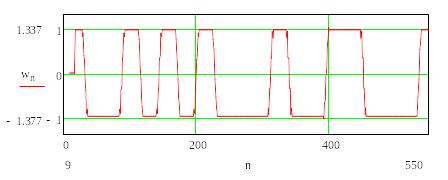
Рисунок 3.6 – Сигнал на выходе частотного детектора