13. Режимы работы микропроцессорной системы. Прямой доступ к памяти.
Прямой доступ к памяти (ПДП) — это режим, принципиально отличающийся от двух других тем, что обмен по системной шине идет без участия процессора. Внешнее устройство, требующее обслуживания, сигнализирует процессору, что режим ПДП необходим, в ответ на это процессор заканчивает выполнение текущей команды и отключается от всех шин, сигнализируя запросившему устройству, что обмен в режиме ПДП можно начинать.
Операция ПДП сводится к пересылке информации из устройства ввода/вывода в память или же из памяти в устройство ввода/вывода. Когда пересылка информации будет закончена, процессор вновь возвращается к прерванной программе, продолжая ее с той точки, где его прервали.Реакция на внешнее событие при ПДП существенно медленнее, чем при программном режиме.
В систему вводится дополнительное устройство (контроллер ПДП), которое будет осуществлять полноценный обмен по системной магистрали без всякого участия процессора.
П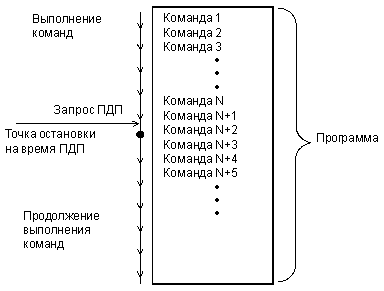 роцессор
предварительно должен сообщить этому
контроллеру ПДП, откуда ему следует
брать информацию и/или куда ее следует
помещать.
роцессор
предварительно должен сообщить этому
контроллеру ПДП, откуда ему следует
брать информацию и/или куда ее следует
помещать.
Скорость обмена в режиме ПДП обычно ограничена возможностями магистрали.
Рис. Обслуживание ПДП.
1 5. Аппаратное обеспечение микроконтроллера. Изменяемый функциональный блок микроконтроллера.
Изменяемый функциональный блоквключает в себя модули памяти различного типа и объема, порты ввода/вывода, модули тактовых генераторов (Г), таймеры. В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола внутренней контроллерной магистрали. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства.
Рис. - Модульнаяорганизация МК
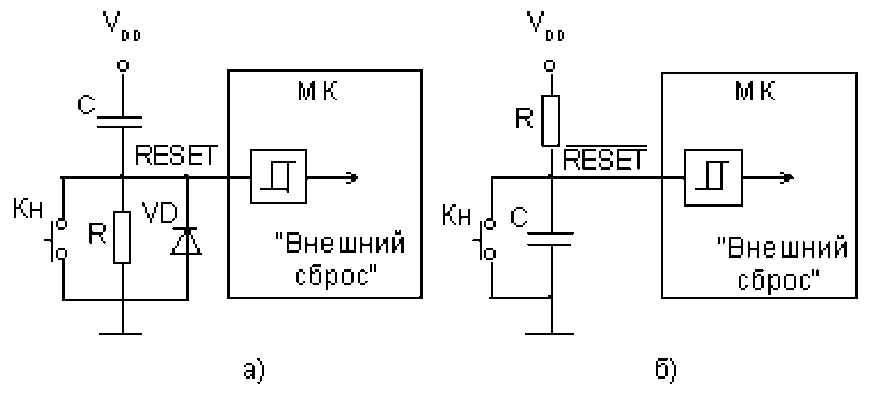
17 Схема сброса
При включении напряжения питания МК должен начать выполнять записанную в памяти программу работы. На этапе нарастания напряжения питания МК принудительно переводится в начальное состояние, которое называют состоянием сброса. При этом устанавливаются в исходное состояние внутренние магистрали МК, сигналы управления и регистры специальных функций. Последние определяют начальное состояние периферийных модулей МК, которое чаще всего по умолчанию неактивно.
Для перевода МК в состояние сброса при установившемся напряжении питания достаточно подать сигнал высокого или низкого уровня (в соответствии со спецификацией МК) на вход сброса (RESET). При нажатии кнопки "сброс" или включении питания буфер линии устанавливается в режим ввода и реализует так называемый внешний сброс. МК может перейти в состояние сброса также по сигналам устройств контроля состояния, которые имеются в составе контроллера.