

2 Специальная часть
2.1 Анализ существующих методов контроля параметра
Поплавковые уровнемеры
Поплавковый уровнемер работает по принципу перемещения поплавка по скользящей трубе при выталкивании его к верху жидкостью. При сокращении жидкости в ёмкости по той или иной причине, поплавок опускается вниз. Тем самым достигается точная сигнализация уровня в ёмкости или резервуаре на любой высоте наполнения.
Поплавок, сделанный из различных марок стали (нержавеющая сталь, титан) имеет внутри постоянный магнит и перемещается вдоль трубы, в которой располагаются магнитные контакты (герконы). Магнитная система переключает контакты на заранее установленной высоте переключения, для получения электрического сигнала на различных уровнях наполнения ёмкости. Такой простой, но очень надёжный и безопасный метод измерения жидкости в ёмкостях применяется в широких областях промышленности, энергетики, пищевой промышленности и фармацевтики, а также в различных областях имеющих емкостное оборудование. Данное оборудование без проблем работает в условиях повышенного пенообразования, а также токопроводимости. Поплавковому уровнемеру не страшна вибрация, приборы изготавливаются под высокое давление и температуры.
Буйковые уровнемеры
Принцип действия буйковых уровнемеров основан на широко известном физическом явлении, описанном в законе Архимеда: на тело, погруженное в жидкость, действует выталкивающая сила, которая пропорциональна весу вытесненной телом жидкости. Цилиндрический буёк, который изготовлен из материала, плотность которого больше плотности жидкости, является чувствительным элементом буйковых уровнемеров. Примером материала буйка может служить нержавеющая сталь.
Буек располагается в вертикальном положении и должен быть частично погружен в жидкость. Длина буйка подбирается таким образом, чтобы она была приближена к максимальному измеряемому уровню.
По закону Архимеда вес буйка в жидкости должен изменяется пропорционально изменению уровня этой жидкости.
На рисунке 2.1 приведена измерительная схема буйкового уровнемера.
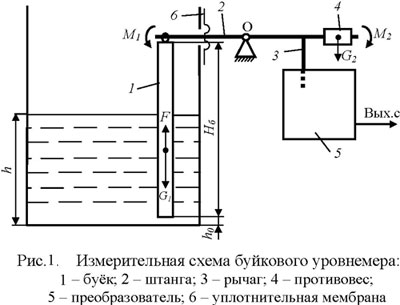
1 – буёк, 2 – штанга, 3 – рычаг, 4 – противовес, 5 – преобразователь, 6 – уплотнительная мембрана.
Рисунок 2.1 – Измерительная схема буйкового уровнемера
Действует уровнемер следующим образом. Когда уровень жидкости в емкости меньше или равен начальному уровню h0 (зона нечувствительности уровнемера), измерительная штанга (2), на которую подвешен буек (1), находится в равновесии. Так как момент М1, создаваемый весом буйка G1, уравновешивается моментом М2, создаваемым противовесом (4). Если уровень контролируемой среды становится выше h0 (например, h), то часть буйка длиной (h – h0) погружается в жидкость, поэтому вес буйка уменьшается. Следовательно, уменьшается и момент М1, создаваемый буйком на штанге (2). Так как момент М2 становится больше момента М1, штанга поворачивается вокруг точки (О) по часовой стрелке и перемещает рычаг (3) измерительного преобразователя (5).
Электрический или пневматический измерительный преобразователь формирует выходной сигнал. Движение измерительной системы происходит до тех пор, пока сумма моментов всех сил, действующих на рычаг (2), не станет равной нулю. Уплотнительная мембрана (6) служит для герметизации технологической емкости при установке в ней чувствительного элемента.
Как вариант, буек может быть установлен в специальной выносной камере вне технологической емкости.
Гидростатические уровнемеры
Гидростатический способ измерения уровня основан на том, что в жидкости существует гидростатическое давление, пропорциональное глубине, т. е. расстоянию от поверхности жидкости. Поэтому для измерения уровня гидростатическим способом могут быть использованы приборы для измерения давления или перепада давлений. В качестве таких приборов обычно применяют дифманометры.
При включении дифманометра перепад давлений на нем будет равен гидростатическому давлению жидкости, которое пропорционально измеряемому уровню.
Радиометрические уровнемеры
Радиометрическое измерение уровня основано на облучении с использованием физического закона поглощения излучения, проходящего через материал. Поглощение гамма-излучения подчиняется экспоненциальной зависимости. Интенсивность исходного рабочего луча ослабляется по мере прохождения через «продукт». Толщина стенок не оказывает влияния на точность измерения, так как является постоянной величиной, ослабляющей излучение, что может быть скомпенсировано соответствующим увеличением мощности источника.
Нелинейность измерительной геометрии компенсируется соответствующим нелинейным распределением активности источника по длине.
Гамма-излучение делает невозможным появление наведенного излучения у разливаемой стали.
Ультразвуковые уровнемеры
Работа преобразователя уровня основана на применении принципа импульсной акустической локации через жидкую среду с использованием цилиндрического волновода. Ультразвуковой импульс излучается пьезоизлучателем, отражается от границы раздела сред и преобразуется в электрический сигнал. По фронту отраженного сигнала формируется временной интервал, пропорциональный длине пробега ультразвуковой волны.
Для повышения точности измерения преобразователь уровня содержит эталонный канал фиксированной длины, позволяющий осуществить калибровку уровнемера и компенсировать расчетным путем скоростную погрешность, обусловленную градиентом температуры и плотности. Электронный измерительный блок преобразователя осуществляет коммутацию преобразователей уровня, формирует временные интервалы и с помощью встроенного микропроцессорного блока осуществляет расчет уровня.
Емкостные уровнемеры
Работа таких уровнемеров основана на различии диэлектрической проницаемости жидкостей и воздуха. Простейший первичный преобразователь емкостного прибора представляет собой электрод (металлический стержень или провод), расположенный в вертикальной металлической трубке. Стержень вместе с трубой образуют конденсатор. Емкость такого конденсатора зависит от уровня жидкости, так как при его изменении от нуля до максимума диэлектрическая проницаемость будет изменяться от диэлектрической проницаемости воздуха до диэлектрической проницаемости жидкости.