

Выбор регулятора производится по прямым и по частотным показателям качества. В таблице 2.10 приведены прямые показатели качества пи-регулятора и пид-регулятора.
Таблица 2.10 – Сравнительная таблица для разных типов регуляторов
Регулятор/ Параметр |
Перерегулирование σ, % |
Время переходного процесса tп, с |
Затухание ξ, % |
Число колебаний переходного процесса n |
ПИ-регулятор |
0 |
628 |
0 |
0 |
ПИД-регулятор |
0 |
319 |
0 |
0 |
Выбор регулятора по частотным показателям качества. Для системы с полученными параметрами при помощи функции критерия Найквиста строятся годографы АФЧХ (рисунки 2.21 – 2.22), определяются запасы устойчивости по фазе γ и по модулю а для каждой модели регуляторов [8].
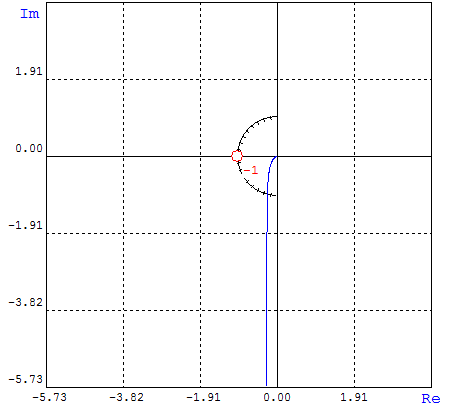 Рисунок
2.21 –
АФЧХ ПИ-регулятора
Рисунок
2.21 –
АФЧХ ПИ-регулятора
Запас
устойчивости по модулю а и частота среза
 для ПИ-регулятора определяются по
формулам (2.37) и (2.38) соответственно:
для ПИ-регулятора определяются по
формулам (2.37) и (2.38) соответственно:

где L – расстояние от начала координат до точки пересечения АФЧХ;
 – запас
по фазе (определяется по АФЧХ регулятора);
– запас
по фазе (определяется по АФЧХ регулятора);
Тоб – постоянная времени.

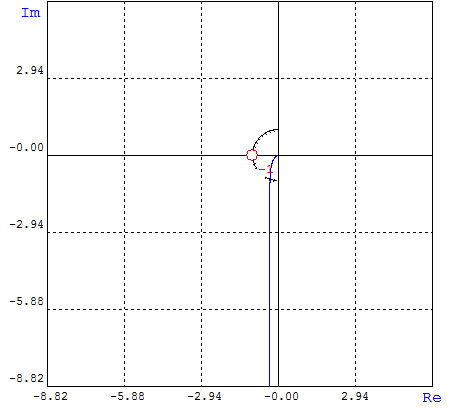
Рисунок 2.22 – АФЧХ ПИД-регулятора
Используя формулы (2.37) и (2.38) рассчитывается запас устойчивости по модулю а и частота среза для ПИД-регулятора.

В таблице 2.5 приведены частотные показатели качества регуляторов.
Таблица 2.11 – Сравнительная таблица для разных моделей регуляторов
Регулятор/Параметр |
Запас по модулю а |
Запас по фазе γ, ° |
Частота среза ωср, рад/с |
ПИ-регулятор ПИД-регулятор |
33,3 |
75 |
0,029 |
25 |
71 |
0,023 |
Вывод: по результатам двух сравнительных таблиц (табл. 2.10 и табл. 2.11) выбирается пид-регулятор как наилучший, который и будет использоваться при дальнейшем исследовании сар.
2.5.6 Изучение поведения системы при воздействии помех(f)
На вход САР с выбранными ранее параметрами объекта и регулятора подается импульсное воздействие, соответствующее системе (2.39):
где f(t) – импульсное воздействие;
а – амплитуда, a = 1;
t1 – время, t1 = 75.
Поведение системы при воздействии помех(f) представлено на рисунке 2.23.
Рисунок 2.23 – Поведение системы при воздействии помех(f)
Из графика можно сделать вывод, что система является помехоустойчивой, т.к. она ликвидирует помеху.
2.5.7 Изучение поведения системы при возмущении по каналу измерения (z)
На вход САР с выбранными ранее параметрами объекта и регулятора подается возмущающее воздействие в виде системы (2.40):
где f(t) – возмущающее воздействие;
а – амплитуда, a = 0,025;
t1 – время, t = 10.
На рисунке 2.24 изображено поведение системы при возмущении по каналу измерения (z).

Рисунок 2.24 – Поведение системы при возмущении по каналу измерения (z)
Из графика видно, что система является устойчивой по каналу измерения z, так как переходный процесс входит в установившееся состояние.
2.5.8 Изучение поведения системы при возмущении по нагрузке (g)
На вход САР с выбранными ранее параметрами объекта и регулятора подается возмущающее воздействие в виде системы (2.41):
где f(t) – возмущающее воздействие;
а – амплитуда, a = 0, 5;
t1 – время, t = 10.
Рисунок 2.25 – Поведение системы при возмущении по нагрузке (g).
Вывод: из графика видно, что в первоначальный момент времени система реагирует на возмущение, но затем входит в установившееся состояние, поэтому система устойчива при возмущении по нагрузке g.